







Vantis BVLOS network

(Courtesy of uAvionix)
High command
Rory Jackson reports on the development of the Vantis command and control network for managing uncrewed traffic in mixed airspace
As commercial and government UAV operations look set to become an increasingly common part of our daily lives, conversations are being had about the kinds of permanent infrastructure needed for ensuring the safety of autonomous aircraft performing survey, logistics, security and other tasks.
When it comes to the safety of civilians on the ground and other aircraft – particularly crewed vehicles – sharing a UAV’s airspace, there must be the persistent ability to monitor and possibly take control of the uncrewed system. In order to ensure effective uncrewed traffic management for BVLOS operations, this capability must be maintained.
There has been a lot of debate over the past 20 years about the kinds of command and control (C2) infrastructure needed, owing to some technical challenges that could impede any effort to build such a network.
The first is aircraft radio technology itself. High-quality radio systems are non-negotiable if a proposed C2 network is to pass muster with the FAA or its counterparts in other nations. But the radios must also be certifiable under C2-relevant TSOs or similar kinds of minimum performance specifications for airworthiness, or have sufficiently high design standards that UAV OEMs could integrate during their own type certification efforts.
The second challenge is that the ground network must also be certifiable in order for the links between GCSs and UAVs to be guaranteed as safe. As well as quality equipment, the radios must be able to communicate with each other as well as the UAVs, while also seamlessly transitioning from one radio to the next in a coordinated fashion.
Lastly, a frequency band must be settled on that will provide enough bandwidth for all the vehicles and radios to communicate without the risk of issues such as congestion, range or multi-pathing constraints. If one wants to build a network quickly, using an unlicenced band such as ISM (industrial, scientific and medical) would be the first choice, but ISM radios are vulnerable to a lot of interference, which their users are expected to deal with themselves.
Licenced-use frequencies such as those for 4G and LTE are less risky owing to reduced congestion, and they are also centrally coordinated by the cellular providers. Also, a ‘specific licenced-use’ frequency would mean a dedicated frequency band exclusively for BVLOS C2 in UAVs, but the expense would be staggering and a lot of deliberation over frequency allocations would be needed.
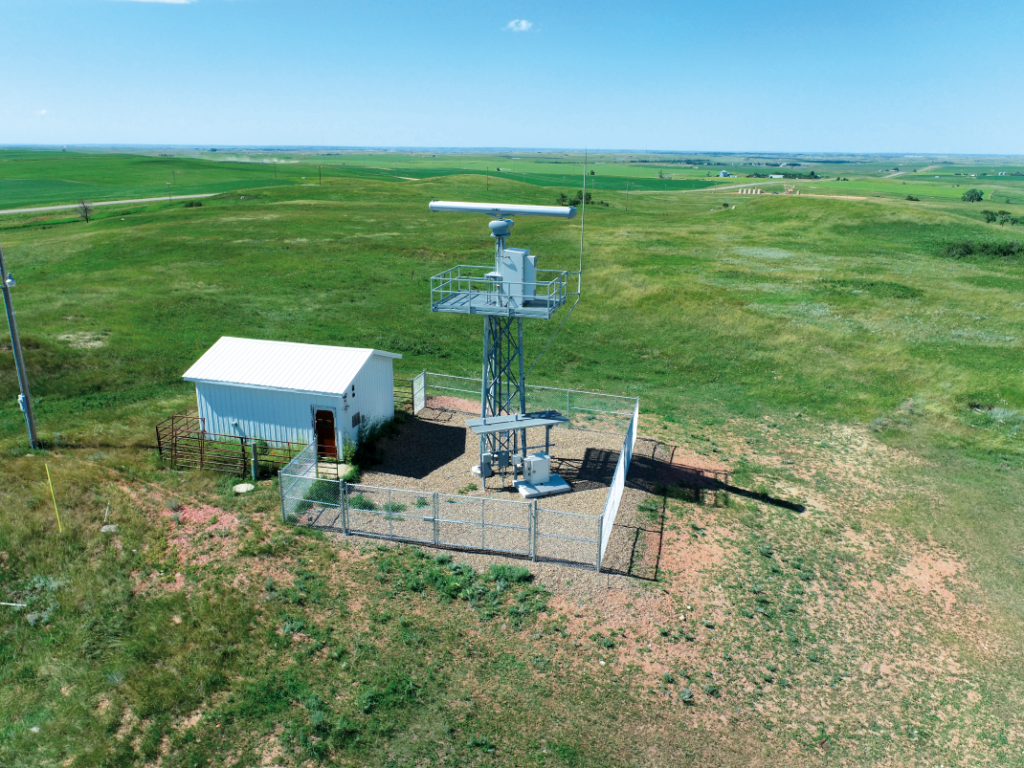
Despite these hurdles though, the first pioneering steps towards widespread C2 links for BVLOS operations have at last been taken, under the eyes of the Vantis network in North Dakota. Vantis will essentially be a state-wide network of radio towers, radars and GCSs to enable constant monitoring of UAVs’ relevant mission telemetry, including vital UTM data such as GNSS location, heading and altitude.
The Vantis network originated from the Northern Plains UAS Test Site (NPUASTS) vision for advancing state-wide BVLOS capabilities and infrastructure. Christian Ramsey, president of uAvionix, says, “North Dakota has a fantastic, intuitively designed and well-maintained road system that’s been key to the thousands of trucks swarming around on behalf of the local oil & gas industry, among many others. They’ve formed their vision of the Vantis project analogously to that: they want a ground-based infrastructure that will enable a new wave of economic activity through uncrewed systems.”

(Courtesy of Thales)
The State of North Dakota has invested in infrastructure intended to get the suppliers 90% of the way towards a complete network. The initial sites for radio tower construction were focused largely on oil & gas hubs in the state’s northwest region, given the strategic importance of persistent aerial inspection for that industry. It is expected that the infrastructure will eventually support the entire state, allowing other industries to take advantage of the network.
A request for proposals was then published in 2020, from which Thales USA was selected as prime systems integrator to build most of the technological aspects of the network. In addition to installing two large radars so far for detect & avoid (DAA) in a UTM capacity, Thales has selected uAvionix as a critical subcontractor for C2 comms service provision.
As well as being the radio manufacturer and installer, the network software engineer and manager, and the provider of hardware for the DAA infrastructure, uAvionix’s biggest and most demanding role in Vantis is that of prime systems test flight operator. Its team takes test UAVs out into the fields of North Dakota, and flies them to study and prove that the network’s C2 and DAA subsystems are working as intended to support its safety case analysis, so that commercial users of Vantis can start flying on it in the near future with confidence.
As Cyriel Kronenburg, uAvionix’s vice-president of business development, notes, “So far, several companies have started to come on board to join the network this year – such as Workhorse, Isight Drone Services, Phoenix Air, the UND Aerospace Foundation, Asylon and American Aerospace Technologies – and we’ll help them with the process.”

(Courtesy of uAvionix)
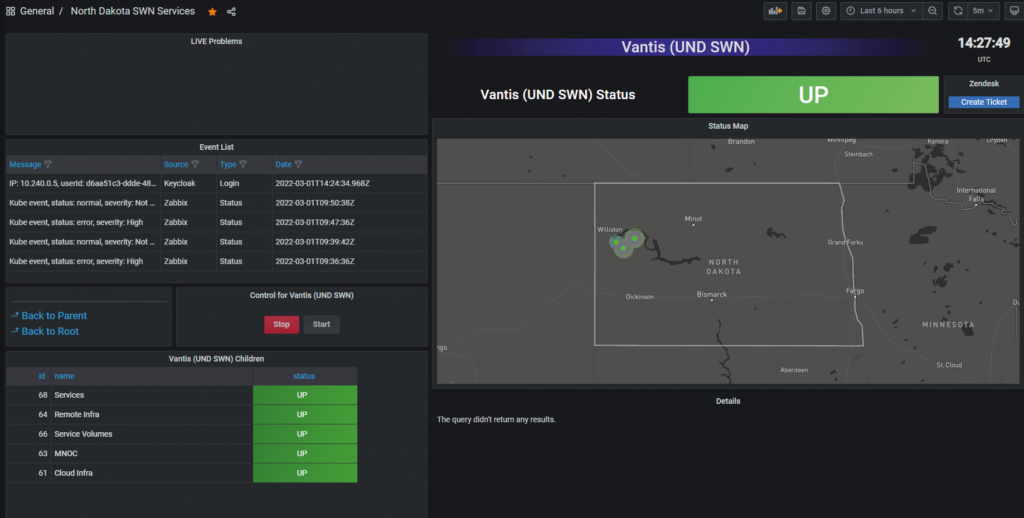
Meanwhile, Vantis’ own team provides critical coordination and leadership support to both Thales and uAvionix, at the sites where the two companies operate as well as elsewhere across the state. From the Mission Network & Operations Center (MNOC) in Grand Forks, ND, Vantis monitors all the flight and integration activities in order to evolve the network’s growth, technological development, safety case, user base and more.
Test aircraft and infrastructure
Ramsey says that, being the prime test flyer for Vantis, uAvionix has to perform hundreds of airborne trials and gather copious telemetry to gauge the performance of the network’s ground systems, aircraft radios and frequencies.
To perform the number and hours of test flights needed (without maintenance-related delays to take-offs), uAvionix has five specially built UAVs, referred to as the Rapace. They are electric VTOL-transitioning systems with twin-boom, inverted V-tail airframes, four vertically disposed electric motors, and one pusher propeller for forward flight.
“The Rapace is not an aircraft we sell; we had it built with some key specifications, but upon delivery we strip out most of the avionics and install our own, including our radios, our autopilot and our GNSS,” Ramsey says. “In that sense, it’s basically our utility truck – we load it up, fly it around and record data. There’s no camera payload, that’s not the job at hand.”
The first piece of equipment installed on board is uAvionix’s George G2 autopilot, which is based on CubePilot’s Cube Orange but with additional sensors for pitot static and magnetic field data. Some DO-254 certified hardware that uAvionix has validated across its other products is also installed.
“It also directly integrates our MicroLink C2 ISM radio, which is what Vantis is initially being built on, as well as our pingRX Pro ADS-B receiver,” Ramsey says.
“Other key equipment for the test flights are our truFYX GNSS receiver for navigation and localisation, and our SkyLink C-band radio, which incorporates two C2 radios and is a back-up to the MicroLink, although it’s on the Vantis roadmap to be a potential future UAV comms system requirement. It’s a fairly empty-looking platform on the inside, because we’ve integrated so much in the George autopilot, and we don’t need anything for cameras or ADS-B Out just yet.”
Andrew Clark, director of UAS operations for uAvionix, adds, “The Rapace is designed for simplicity, as we needed something modular that could be quickly disassembled and packed into a van for cross-country transport, then set up rapidly for field testing. It has an electric powertrain for simplicity’s sake too, which helps keep it light, at 25 lb [11.4 kg] fully equipped, although the motors are powerful enough to tolerate take-off and landing in winds and gusts of up to 25 mph.”
The wings and tailplane are also designed to accommodate the antenna array used, with enough interior space to enable uAvionix to mount its autopilot and other systems in different positions as needed. The battery allows a nominal flight endurance of up to roughly an hour, although Clark’s team has yet to fly for that long, given the unnecessary risk it would pose.
(courtesy of Thales)
“We use two 22,000 mAh packs connected in series for a 50 V power bus, and we always try to land with 50% of charge remaining, because of how much power is consumed during landing,” he says. “To be honest, we can get between 40 and 50 minutes and still have a very safe margin of energy left.”
Ramsey adds, “We also have other test assets in the form of a few small quadrotors, mostly Freefly Astros. We’ll fly those with one of our radios installed as their payloads, not as the C2 link, as they’re somewhat closed in their architecture, but they’re great for ‘pop-up’ tests where we just need to drive to a new location and scope it out for something like connectivity, signal strength, or ease of take-off or landing, where the larger test platform isn’t really necessary.”
In addition to these vehicles, uAvionix is commissioning a hybrid VTOL-transitioning UAV that will use a gasoline engine for longer cruising times, along with electric motors for take-off, hover and descent. This combination will enable radio tests, and hence more data to be accumulated, over longer flights.
“We also supply our pingStation 3 ground ADS-B receivers to the network, for detecting cooperative aircraft,” Ramsey says. “Those, plus Thales’ radars, provide Vantis’ DAA capability.”
Frank Matus, Thales’ director of ATC & digital aviation solutions, Americas, adds, “Remaining well clear of crewed aviation when performing BVLOS operations requires a surveillance infrastructure and an electronic means of observation. So with Vantis we’ve installed medium-range radars, a control and non-payload comms radio as well as ADS-B at sites in Watford City, Keene and Arnegard.
“Specifically, we installed Terma’s Scanter radars, which detect crewed aviation to be visualised on a common display at the MNOC. That is especially important, as not all VFR flights are equipped with ADS-B.”
Pre-flight planning and set-up
The development of uAvionix’s test aircraft in the lead-up to the flight trials was a short affair, taking less than a month to get in the air after concept work began, although some fine-tuning of its geometries and componentry has been carried out to improve flight performance.
“We record and log every flight, and our total air time comes to around 120-150 hours now,” Clark says. “Preparation for each flight starts about a week in advance. First, Thales provides flight test cards, which include .KMZ overlays of where we’re going to be flying, what patterns we’ll be flying in, approximate flight times and key locations of strategically placed visual observer personnel to ensure constant VLOS of the aircraft.”
Matus adds, “Thales coordinates closely with the NPUASTS on the flight cards. That coordination ensures the cards are aimed at testing end-to-end system connectivity over the C2 link, such that the aircraft maintains constant comms with the network.”

While some flights take place in areas generally familiar to Clark and his immediate team members, inevitably some will be in completely new locations, meaning a day or so of site surveys will be needed. Once the area’s geography is understood well enough, the team takes two vans containing the UAV and its GCS hardware. Set-up takes about 5-10 minutes for all the necessary equipment.
“We then set up some local antennas on the vans,” Clark says. “They aren’t totally necessary, because the UAV should be constantly connected to the GCSs through local Thales connectivity systems – which typically they’ve installed on their radar towers or some nearby cellphone towers – but our antennas bypass all the other networks to connect to our C-band radios, for a guaranteed back-up in case of network outages.
“At the same time, we go through the logbook and make sure everything checks out with all the aircraft and ground computer subsystems. That’s currently a paper logbook but we plan to upgrade to an electronic, automated system in due course, which will streamline the pre-flight stuff nicely. Effectively that will be a digital checklist and a set of equipment status logs, combined and integrated into a GCS.
“It’s standard for us to go through a pretty rigorous pre-flight check, particularly close inspections of servos, hinges and joints, given that the UAV will usually have been bouncing around in the back of a van for a couple of hundred miles. It’s also checked for GNSS, for timing as per the PPS pulses, and for accelerometers and gyros.”
The team will also initially test the UAV’s data links and command responses using its local antenna. That will include lifting up the aircraft on one side to see if it tries to autocorrect itself, validating that its stabilisation and computer control systems are working correctly. It will then be connected to Thales’ equipment in the network.

Some safety and operational briefings follow, including reviews of weather and other environmental risk factors, and launch typically starts within 90 minutes of having arrived at the test site.
Test flights
Some key equipment is critical to the safety of uAvionix’s UAVs as they fly across the Vantis area. For one, the Terma Scanter radars and the core Vantis interface software (from Thales) collectively provide a ‘tracker’ functionality, which as per traditional air traffic control systems fuses all the information on nearby non-cooperative aircraft into single targets that are visible via the GCSs as moving targets and data overlays. That provides effective collision avoidance.
“The core software has been developed by leveraging elements of Thales’ TopSky UAS Airspace Manager software, adapted to meet the maturity level requirements identified in the FAA Safety and Risk Management Process,” Matus says. “That, coupled with health and status monitoring for the Vantis infrastructure sites, embodies a complete ‘mission and airspace management concept’ that is critical to supporting BVLOS UAV operations.”
Ramsey adds, “The TopSky-based front end is what we plan our flights through, where we initialise and execute our missions; it logs the starts and stops. As much as we supply parts to – and perform flight tests for – the Vantis network, Thales is very much the systems integrator that brings it all together, so the end-users will be getting just a single comprehensive solution out of all of this.”

(Courtesy of uAvionix)
On GCS specifics, Clark and Matus comment that Thales equips uAvionix’s UAS operators with a human-machine interface (HMI), which is integrated with Appareo’s ‘electronic flight bag’ app, Stratus Insight. The HMI is run on a Thales-supplied GCS tablet, which displays a map of the area of operation around uAvionix’s test UAV, illustrating the merged feed from the ground radars as well as the UAV’s ADS-B receivers.
It also supports the team before and during flight by arranging and optimising the intended operational volumes, routes and trajectories for safety. And it provides dynamic assistance functions for airspace management, airspace restrictions and UAS operator mission needs.
The HMI also accounts for operational impacts, including other known operations, aircraft performance, weather forecasts, ground and airspace constraints, and ground or air risks. These include moving targets of any other aircraft and displaying alert rings to mark ‘Do Not Cross’ lines that the team must maintain between their UAV and any encroaching aircraft.
Lastly, it includes a function to plan and obtain approval for UAS operations in accordance with all the local and national regulations. Kronenburg adds, “Also among the equipment taken to the launch site is another console with our SkyLine system installed. It’s a software interface showing a map of all the radios with a DO-377 compliant C2 link capability to our flight team. That gives useful ranges on where the UAV needs to be to be able to transmit live health and status data, as well as receive commands if necessary, so Andrew and his team know where to adjust the flight path if needed.”
(Courtesy of Thales)
The flights are also live-streamed over a teleconferencing link to ensure that Vantis and Thales can monitor the progress and details of the test in real time, and that key uAvionix personnel can follow and participate in the operation remotely.
Different kinds of flight missions are performed for gauging how Vantis’ roll-out (and Thales’ and uAvionix’s contributions to it) are going. If the aim of the mission is to test C2 network coverage, the UAV will be flown at a number of different radials, altitudes and distances relative to the target ground radio stations.
“We’ll fly at 400, 600 or 900 ft, or even up to 1200 ft depending on the authorisations we’ve been given,” Clark explains. “The ranges are usually within 3 to 5 miles of the ground towers, although sometimes we’ll fly in circles of differing radii around a given tower as a means of range testing. In fact, we’ve managed to maintain connectivity up to 86 miles out, which is impressive for such a tiny ISM radio.”
During these flight patterns, a script written by one of uAvionix’s engineers is run on the HMI, which will send inert messages to the UAV and time how long it takes to get a reply corresponding to each message.
“That means we don’t have to tell the aircraft to throttle up or down or anything like that – the inert message travels the full length of the network and radio system, so it works as well as any practical command,” Clark says. “That allows us to gather recordable and analysable data on the latency, speed, quality and packets of the outgoing and incoming signals.”
Ramsey adds, “We’re also constantly logging signal strength between the ground radios and airborne radios; each of those is dual-redundant so we’re able to take two data points from each ‘unit’. In addition to latency, we’re also testing ‘continuity’, which is how consistently the messages get through on the first transmission attempt, without retries.
“Lastly, there’s a throughput component: how much of the data of each message gets through. And when flying C2 coverage tests, we’ll monitor all these signal quality stats between multiple radio towers and the UAV at once, which allows the system to determine in real time, and based on signal quality, which of the ground stations is the best choice for secure C2 at any given moment.”
The team must also sometimes conduct ‘encounter flights’, in which Thales instructs a crewed aircraft to fly at an altitude different from that of the UAV, and Clark and his colleagues respond as if the two aircraft were at the same altitude. This is to practise for DAA situations in as realistic a manner as possible without endangering the airborne flight crew.
“It flies at us from an unknown location, at an unknown speed, which enables us to test the algorithms designed for notifying us of non-cooperative aircraft. Based on the velocity of that aircraft versus ours, we can make our alert rings larger or smaller to meet the average time necessary to return to base, land in place or land at one of the predetermined alternative zones. All of that helps prove out the test case for safe airborne DAA in the network.”
For further UTM safety analysis, all the radar surveillance and ADS-B data can be logged in each flight, to enable full replays and evaluations of how the UAV might have handled different safety-relevant air traffic situations.

(Courtesy of uAvionix)
Naturally, some of that data might, in real time, indicate some safety-critical performance loss in one of the items of mission equipment (be it on the UAV or the ground). If that occurs, the HMI displays a warning to the attending flight test engineer so that the UAV can be landed or at least descend to a safe altitude to minimise the risk of collisions with other aircraft.
Post-flight processing and maintenance
Although a lot of real-time monitoring of the data takes place – including colour-coding values such as signal strength to allow members of Vantis, Thales and uAvionix to judge the network’s connectivity and coverage at a glance – most of the real analysis of the network happens after the UAV is recovered and its data post-processed.
“That’s something we work on internally though, because ideally we can always look to present things like running averages of latency and continuity over time, to give everyone clear indicators that the network equipment is working well,” Ramsey notes.
As mentioned, the UAV always returns with a safe margin of remaining battery charge, and after it has landed a fresh round of fully charged packs can be installed. “As the UAV flies, we’ll have several other sets of battery packs on charge, so as long as it lands without taking any damage, we can immediately swap the batteries and keep on flying all day,” Clark says.
The cycle of launch, recovery and battery swap continues until the end of working hours for the uAvionix team. In the evening there is a debrief, in which Clark might discuss with his team any points for change or improvement of future test flights based on the events of the day.
Between flights, there might be changes to equipment on the UAVs or GCSs, or around them (such as antennas), so a ‘maintenance test flight’ will be needed. Clark says that consists of flying the UAV in a specified test area, not as part of a mission but of a more risky flight pattern.

(Courtesy of uAvionix)
Post-processing allows for detailed evaluations of network quality between different stages of development and times of year. It also allows analyses necessary for identifying where hardware and software can be altered to enhance C2 link quality to be identified, and overlays of different mission parameters and data sets to predict where the network must be strengthened to ensure the safety of customers’ uncrewed assets and any other aircraft passing through the area.
Over the horizon
Although the Vantis network’s coverage stretches over only a small area at the moment, the government of North Dakota is clear in its wish for the roll-out to continue state-wide, with more radios, radars and capacity being added over time and more UAVs flying simultaneously.
“We’re also using Vantis as a blueprint for safe and scalable BVLOS flights for other states and regions,” Matus notes. “In practical terms, we’ve identified a clear path towards safe and recurring UAS operations by providing aviation-grade infrastructure and field-proven operational procedures for the network’s end-users.”
The network’s technologies will probably evolve over time, in both software-defined and hardware terms. For instance, uAvionix has just released a new ‘link manager’ system that will be able to coordinate and select between multiple C2-capable radios on a UAV – be it an ISM radio, an LTE radio, a C-band radio or other – based on which performs the best, is the safest or least costly (in data billing terms) to use at a given moment.
“And as mentioned, we anticipate a transition away from ISM radios to C-band radios, as the latter have greater power and hence range, meaning the corresponding ground network wouldn’t need to be as dense,” Ramsey says. “They are also safer than ISM, because they will be subject to far less interference. And our SkyLine system will keep evolving to collect more data as we learn what’s most important to our customers going forward.”
He also says uAvionix is in talks with other projects and organisations (currently undisclosed) that are interested in the progress of Vantis and how it could be recreated elsewhere in the world, and that even Vantis itself wants to replicate its own success, most likely starting with its immediate neighbouring states.
“We’re also now in the process of getting our 91-113 BVLOS waiver, which will allow uAvionix to start BVLOS test flights in the network as well. That will speed up the end-users’ own BVLOS approvals.”
And although some of those end-users have been named earlier as UAS companies, Matus notes that Vantis’ infrastructure supports commercial UAV operations as much as advanced aerial mobility vehicles such as urban air taxis or other crewed autonomous eVTOL systems.
He therefore anticipates that Thales’ role and technologies will also evolve to satisfy the long-term needs of Vantis’ user base of aerial systems.
UPCOMING EVENTS








