







Three-layer UTM
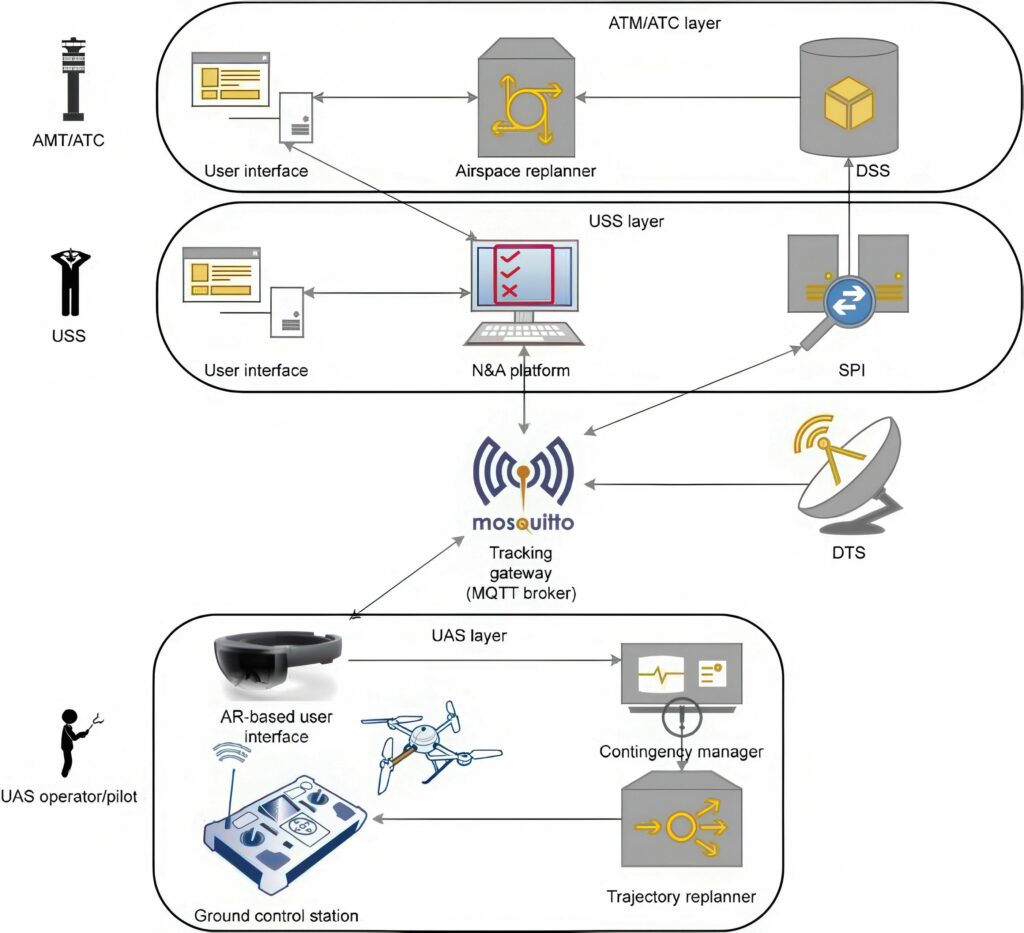
(Image courtesy of the University of Salento)
A team in Italy has developed a three-layer uncrewed traffic management (UTM) system for uncrewed aircraft in critical airspace, writes Nick Flaherty.
The AcrOSS (Environment for Safe Operations of Remotely Piloted Aircraft) platform developed by a team at the University of Salento, is designed to manage access to low-altitude airspace with beyond visual line of site (BVLOS) operations, and ensure safe integration of uncrewed air systems (UASs) into both controlled and uncontrolled airspace.
The platform features a three-layer architecture, including the air traffic management/control (ATM/ATC) layer, the UAS Service Supplier (USS) layer, and the UAS layer. Each layer has distinct responsibilities.
For example, the ATM/ATC layer manages crewed aircraft and relevant airspace, while the USS layer is in charge of UAS operations.
The platform includes a new Notification/Authorisation (N&A) platform, which coordinates airspace operations, together with an augmented reality (AR) component to improve a remote operators’ situational awareness. A contingency manager suggests actions in case of unexpected events.
The differences between what is prescribed by the European regulatory framework and what has been developed within the AcrOSS project concern the object of the take-off authorisation: a four-dimensional (4D) trajectory within the regulatory framework and the use in segregated areas.

With a 4D trajectory, the take-off clearance would involve a precise, time-based flight path that the UAS must follow. The clearance would be integrated with a comprehensive plan that covers the entire flight, including climb, cruise, descent and landing phases. This approach emphasises predictability and optimisation, ensuring that the trajectory of each UAS is managed to fit seamlessly into the overall traffic flow.
The segregated areas approach used by AcrOSS has the UAS cleared to fly into a predefined airspace region that is reserved for specific types of operations. The clearance would specify the boundaries of this segregated area such that the UAS could operate without conflicting with other traffic. Segregated areas also offer a straightforward means of managing airspace, making it easier to enforce compliance and ensure that UASs adhere to the rules governing these zones.
Both approaches are valid and should not be considered as alternatives to each other but complementary, said the researchers. The 4D trajectory fits well in typical logistics scenarios – such as parcel delivery – where it is possible to accurately predict the path that the UAS will have to follow during the mission. In other scenarios, however, such as environmental monitoring or people search, the approach proposed by AcrOSS is preferable.
Experimental tests at the Grottaglie–Taranto airport in Italy used a DJI Mavic 2 Enterprise Dual quadcopter and covered various aspects, such as flight parameter monitoring, geofence functionality and the response to contingency scenarios. The results showed that the platform could accurately display flight parameters in real time, and that the geofence effectively signalled potential violations. Feedback included integrating weather forecast information into the flight plan submission process, extending the cartographic map and enhancing the interface of the AR headset.
The team now plans to test the platform in different critical scenarios and integrate weather forecast information obtained from public application program interface.
UPCOMING EVENTS








