







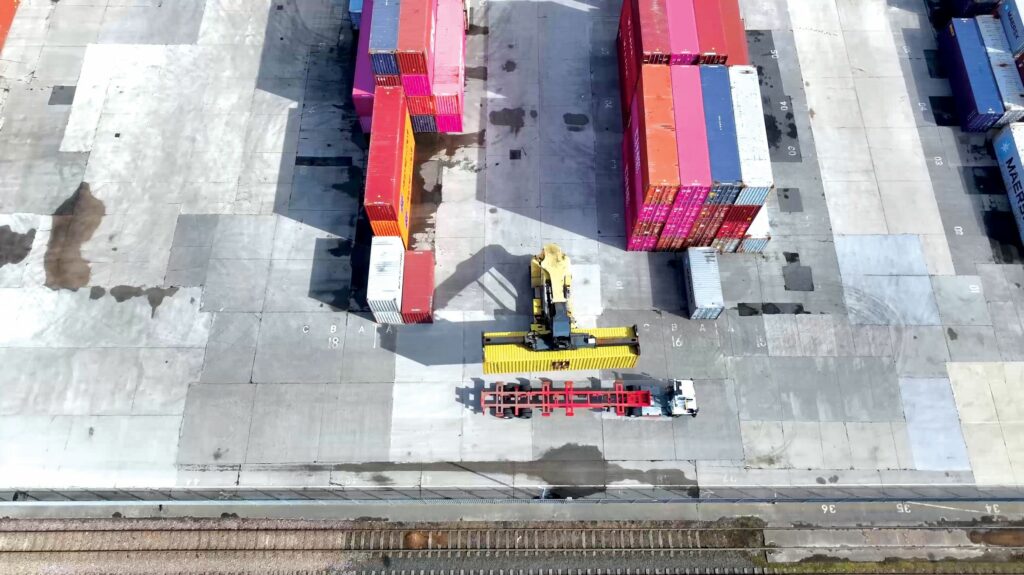
Oxa at the Port of Tyne

(All images: Oxa)
Quay example
Oxa’s successful demonstrations of a retrofitted terminal tractor bring autonomous ports alive in the northeast United Kingdom. Rory Jackson reports
All around the world, ports represent some of the most vibrant and crucial microcosms of the global economy. Commodities and new inventions from countless nations flow in and out of ports daily, feeding or funding their industries and consumers both local and international. That flow relies on the tireless movement of machines, people, software and data, as well as an up-to-date ecosystem of logistics, communications, security, energy and mobility infrastructure.
As disclosed through discussions with experts such as Dr Beatriz Canamary (Issue 64), the high economic and strategic value of ports, not to mention their non-stop and repetitive operations, mean that they have among the highest market potential of any use-case for uncrewed systems. With ports struggling to attract new labour and keep up with the growth of international trade and the ensuing in- and outflows of goods, autonomy solutions that can enhance productivity to make up for worker shortfalls while maintaining or improving safety levels are in high demand.

The Port of Tyne in Northeast England is an especially key economic node for the region, being both the point of export for Nissan cars built at the Japanese OEM’s nearby factory, and the entry point for many parts critical to their manufacture. As a result, it is treated as a paramount staging ground for autonomy and connectivity solutions by the UK’s governmental and technical proponents.
Most recently, it was the location of the Port‑Connected and Automated Logistics (P-CAL) project, having been initiated in mid-2025 as the latest in a series of projects in the area. The project was aimed at tackling some of the unending logistics needs of ports with AVs. It was funded by the Centre for Connected and Autonomous Vehicles (CCAV), a joint unit between the Department for Business and Trade (DBT) and the Department for Transport (DfT), and delivered in partnership with Innovate UK (the UK’s foremost innovation agency) and Zenzic (bringing together industry, government and academia to support the strategic rollout of Connected and Automated Mobility technologies in the UK).
The project was carried out by autonomous vehicle technology company Oxa (so-called for its headquarters in Oxford, UK, although the company has an additional facility in Toronto, Canada), in conjunction with the North East Automotive Alliance (NEAA), an organisational cluster with responsibility over the region’s automotive industry and supply chains – along with a consortium of partners.
Over the past several years, the groups have worked together on the kinds of projects alluded to above to explore commercial applications of autonomy, with an eye towards eventual proving demonstrations of autonomous systems in unstaged, unsegregated operations at the Port of Tyne – those demonstrations having finally taken place in March 2026.
As Ross James, Oxa’s director of solutions – responsible for deployments with customers across the UK and Europe – tells us: “We’ve been interested in ports in general for a great while now, as a strong use-case for where industrial autonomy could make a real, near- and long-term impact, moving goods in and out of countries. So, P-CAL was, in many ways, a long-awaited marriage of both that principal interest and our relationship with the NEAA and wider consortium.
“In addition, P-CAL’s been a very ‘express’ programme, which has meant leveraging all of the work we’ve done previously, in order to take a machine and upfit it with our autonomy systems really quickly, to get it working in a really short timescale.”
While the P-CAL project lasted roughly nine months, the vast majority of tangible and technical activity happened in 2026, the veritable third and final act of the overall programme. That entailed Oxa taking delivery of the core machine – a vehicle from the Netherlands’ Royal Terberg Group, which is a well-established and popular OEM for its terminal tractors in port operations – and integrating its sensors, computers and software onboard over the course of a week. This was followed by working through a commissioning process lasting roughly two more weeks, to pass acceptance testing within its own facilities, thereby greenlighting the vehicle to commence work on-site at the Port of Tyne.
“After that, we worked on site starting from around the back end of February, ramping up our activities through March to cover the full operational use-case that the port authorities have there, including their ship-to-shore cranes on the quayside and their container stacks farther afield,” James continues.
That work culminated in a full workflow demonstration, taking place at the end of March 2026, which we will unpack below – although not before we look into the technologies, integrations and other preparations by which Oxa executed this landmark autonomous port activity, without needing any special segregations or precautions outside of normal port activities (making it a functional and applicable operational design domain for autonomy integrations to come at Tyne and elsewhere).

The truck
The exact vehicle used in the demonstration was a YT193 DBW yard and terminal tractor, a widely-used cargo-moving vehicle with roughly 75 t of hauling capacity, powered by a 142 kW (190 hp) Cummins B6.7 Stage V diesel engine.

“The Terberg YT193 DBW is a drive-by-wire vehicle, and naturally it’s beneficial if an OEM can bring forwards a by-wire system for us to work with. But, fundamentally, we are OEM-agnostic and we actively look into implementing our technology in a wide range of different machines and control arrangements, including leveraging a number of available options for providing autonomous driving and working functionalities,” James explains.
Oxa’s autonomy integrations began with something it calls its “reference autonomy design,” an operational blueprint that lays out an architecture of requirements for the hardware to be installed on a newly-received vehicle.
“We’re increasingly looking to optimise that reference autonomy design such that it’s common across our different applications, as far as possible, or at least with a standardised core across our projects,” James continues.
“It might be the case that there’s always going to be some downstream reconfigurations needed with respect to the number or positioning of sensors, but the absolute core of our hardware should realistically be kept the same.”
Oxa operates its vehicles using an overlapping ecosystem of Lidars, radars and cameras, sharing similarities with a significant number of commercial ground AVs we have explored in the past. Two Lidars are mounted at the YT193’s frontal corners, while five radars are interspersed about its perimeter (resulting in three radars sitting on one side and two on the other, achieving 360° coverage).
Additionally, 360° visual awareness is also enabled by a plethora of cameras, mounted in tall, cylindrical ‘spires’ at the frontal corners, with some space between the spires and the tractor helping some of the cameras to keep track of objects and activity behind the vehicle.
“We also have a couple of extra sensors integrated at the rear, facing backwards – specifically, a short-range Lidar and a camera – that we use not just for real-time situational awareness but also to monitor the angle of the trailer with respect to the tractor unit,” James adds.
“And while we do have preferred suppliers for each of those sensor types, we are able to work with different models, architectures, protocols and so on, so we’re not tied to any one provider.”
As a general rule, Oxa aimed to utilise particularly cost-effective sensors in the name of scalability, although this needed to be balanced against the need for ruggedised and reliably long-lasting products that would offer sufficient robustness and confidence to work amid the impact-, salt- and moisture-prone environment of ports.
Functionality was also a deciding factor. For instance, rather than choosing solid-state designs for all three Lidars, the two frontal corner Lidars were conventional spinning mirror-type solutions because the ability to scan in 360° took precedence over the greater durability and manufacturing-driven price reductions that solid-stage Lidars widely offer. The rear Lidar, however, was a solid-state device, given just the singular rearward direction it needed to keep track of.
“Downstream, the computers had to be chosen to fit within the requirements and potential hazards of the industrial environment, and also to comply with our overall certification strategy,” James says.
“Naturally, within this off-highway space, we’re looking at CE marking in terms of the Machinery Directive [particularly as defined under 2006/42/EC, ISO 13849, and ISO 12100], which defined much of the computer selection, along with the fact that we’re running multiple computation units together.

“That gives us the required degree of redundancy, and we package those units in an enclosure that we’ve designed in-house to guarantee the necessary functional levels of cooling along with mechanical and environmental protection, especially given how the marine environment can degrade poorly-protected electronics.”
Oxa’s software
Among Oxa’s various software capabilities, two solutions were placed front and centre at P-CAL. The first is Oxa Driver, the company’s core software stack for onboard vehicular autonomy, while the other is Oxa Hub, which provides a customer-facing fleet management and monitoring system.
“Oxa Driver’s architecture, modules and algorithms form the essential brain of the self-driving vehicle, and so is embedded onboard the AV itself,” James explains.

“It’s been developed with a close foundation based on our history in on-highway and mixed traffic scenarios. That’s very much one of our advantages coming into controlled but busy spaces like ports: we’re used to operating in mixed traffic environments, with pedestrians and other vehicles.”
Ports being rife with these, Oxa Driver integrates trained object detection, classification and segmentation algorithms vital to perceiving the myriad moving objects around the tractor. Granted, the Port of Tyne and other ports will inevitably introduce objects never seen previously, such as reach stackers and similarly huge, forklift-like mobile machinery.
Hence, some further training and calibration of the company’s perception models was required in the run-up to the March 2026 demonstration, although work to that end had also been undertaken in P-CAL’s forerunner projects and per Oxa’s general focus on ports.
“But another really key thing for us is making sure that our software stack is built around ‘explainability’. Clearly, in these kinds of tightly-run and high-risk industrial environments, it’s really important that we’re able to explain what the AV is doing, how it’s operating and if there are faults or errors, what the nature of those were and why exactly they happened,” James notes.
“So explainability has been a core objective of our Oxa Driver stack, and it’s been really crucial for our customer relationships. Projects like P-CAL and proving grounds like the Port of Tyne aren’t closed-off testbeds that we can play and mess around in freely: these are live, operational sites, and our customer has to be completely assured that the actions of the AV are explainable, by us to them, so they can understand exactly why the vehicle makes the decisions it makes.”
In Oxa’s view, explainability is also a key bridging force into making autonomous systems like the retrofitted Terberg tractor more predictable and familiar in its actions to those around it, those qualities being a gateway to reliability, trust and perceived consistency in industrial applications.
“And explainability includes, at its core, clear exporting of notes on the Oxa Driver stack’s decision-making logic to the customer-side operators so they can understand why it’s taking any given action at any given time, as far as the vehicle is concerned,” James continues.
“Plus, working at the Port of Tyne gives us direct feedback on how that interface should look, what customers want to see in it and how they need it to function. We, in the office, could easily bury ourselves in our work and discuss over how we think it should look, but the real strength in these kinds of reference operations is that we can build the software products around real customer use-cases and needs, to fit with the training, skills and strengths of those who’ll be managing the autonomous fleets of the future.”
Onboarding port-side
Like streets and highways, ports have a number of rules governing where pedestrians and vehicles may move, offload and so forth, of which autonomy stack developers must take account. However, ports enforce such rules more strictly, given the more enclosed environments they represent and the closer responsibility private companies bear for the health and safety of personnel under their watch, not to mention the need to keep trade goods and heavy machinery undamaged.
“That is of benefit to us, particularly in the safety case for autonomous systems, but invariably there are also areas within port sites that operate in a fairly free-form way,” James says. “For instance, you might not see very many lane markers throughout certain large areas, as depending on the time of day, vehicles may have different degrees of freedom to use the free space available to navigate through each site.”
Understanding and working with such port-specific dynamics, and assimilating where the port was more structured than highways and where it was less so, formed a fundamental baseline for preparing Oxa Driver to work at the Port of Tyne, on top of the perennial AV concern of interacting with pedestrians and other vehicles.

“And there’s more than just traffic as far as vehicle-to-vehicle interactions go. The YT193 was there to work and that work involved other vehicles loading things onto our vehicle and then unloading them from it,” James adds.
“Predominantly, the Port of Tyne posed quay cranes that our vehicle would drive under, and then a container would be loaded onto the trailer at the back, before we’d drive to another part of the site where the container would be lifted off by a reach stacker. Each of those other machines operates with the tractor in different ways.
“That integration with the other machines was a primary part of the challenge of P-CAL. Just driving from Point A to Point B autonomously has absolutely no use to ports. You have to be able to integrate with other equipment and move goods from A to B very effectively and consistently.”
Notably, this was Oxa’s first project in which it demonstrated the capability of its autonomous solutions to integrate with a terminal operating system (TOS). TOSs are systems through which the movement of containers – from vessels to stacks and vice versa – is orchestrated and commanded. The conventional TOS interface will include notifications regarding incoming freighters, their cargo manifests and orders regarding the allocated delivery zones, vehicles and timings per each container within those manifests.
“Each TOS is unique to its host port, but we as Oxa had previously developed APIs with a view towards integrating Oxa Hub and Driver with other, complex systems, including higher-level command and control systems like a TOS,” James says. “But from a TOS perspective, the Port of Tyne is the first place and time we’ve showcased the capability to integrate directly with one of those.”
Preparing for that meant Oxa closely analysing the messages it would receive from the TOS, and evaluating them for containers’ sizes and destinations, as well as when, within the tractor’s workflows, those messages would be received (because that would then need to tie-in somehow to the movements of the AV).
“Because when the YT193 arrives at a given location, it needs to have a message telling it where to find the crane, what the crane will load it with – for example, maybe a 20 ft container, or a 40 ft one – because that informs us where the tractor needs to position itself for safely receiving the payload,” James continues.
“After being loaded with the container, we’ll receive another TOS message saying where that container needs to go in the container yard. A lot of work went into understanding that messaging structure, and how those messages would be received and implemented as low-level commands on where and how the AV needs to move.”
At a more granular level, the AV also needed to be programmed to maintain a safe vehicle state for receiving cargo – not, for instance, driving off for a container’s destination before the container in question was fully-lowered and released by the crane, or else serious accidents could occur – not only machine-on-machine, but also for potentially causing harm to humans, given that ports will long remain mixed environments with personnel among the automation.
“So that safe state then needs to be signalled to human crane operators, with external lights to show that the container can be lowered or lifted because the AV won’t move,” James says.
Further integration and infrastructural work was minimal, particularly because the Port of Tyne already possessed a private 5G network for rapid communications among vehicles and personnel, although Oxa notes it can use almost any sort of comms infrastructure (whether wireless or otherwise, with the YT193 integrating a CAN bus for its own onboard network).
Stand and deliver
Given the live, practical nature of the demonstration, the general, high-level challenge for Oxa – and the port authority’s main concern – was ensuring that the YT193 could operate without interfering with the routines of any other machinery or the port’s personnel.

“We have to be flexible in order to dovetail into ports’ operations without introducing new disturbances or complexities into them. The customer’s highest priority is getting containers from ship to stack, so we work with and listen closely to them to get clear orders on when and where we can and can’t operate,” James explains.
Hence, while autonomy could make 24/7 port logistics easier to achieve, the primary objective was maximising the quality (comprising both efficiency and safety) with which the tractor worked within its time constraints and within the live environment.
“So, it’s hard to nail down an exact duration of working hours we pulled, but it was around 140–150 km of compressed activity over a few days per week, with a short number of weeks,” James says.
As mentioned, the work consisted largely of round trips delivering containers from quay cranes to reach stackers before returning to the cranes, all amid regular port traffic. The first, specific technical challenge here was that the quay cranes at the Port of Tyne are not static machinery – they move up and down the quayside to address different container vessels, making intelligent, reactive autonomy vital to locating and meeting them for loading.
“So, you couldn’t easily apply AGVs [automated guided vehicles] in sites like the Port of Tyne. There are some automated ports that operate using AGVs, but they’re fully segregated sites, with the AGVs and cranes typically running waterside, and manually-driven vehicles operating landside,” James explains.

While such systems appear to work for certain tasks, redesigning an existing port around that would incur immense infrastructure costs and inevitably require shutting down the port for an extended period, choking regional and potentially international trade.
“Deploying AVs into a working environment that can assimilate seamlessly into mixed traffic is the far more cost-effective approach, and beyond the cost there’s the differing feasibility between solutions: transitioning from mixed to segregated traffic just isn’t possible in most brownfield sites,” James says.
As to the crane: the YT193 would receive a GPS coordinate for its assigned crane through the TOS messaging and 5G network and brake, in its safe state mode, in the correct spot for receiving a container on its trailer.
Significant proprietary technical IP revolves around how Oxa ensures precise and appropriate positioning about the cranes amid the highly interference-rich environment that the metals, concretes and RF-congestion of ports present, although much of it is powered by how the perception sensors and their data are handled by the software and hardware.
“And beyond the cranes themselves, the quayside at the Port of Tyne is quite a dynamic area. Containers and vehicles can be parked randomly and thickly in unexpected positions, and there can be all kinds of similarly sporadic happenings, resulting from the very non-clockwork nature of shipping, through which an AV can navigate but an AGV would be forced to stop,” James adds.
Hence, Oxa Driver was critical to ensuring the YT193 bore intelligence beyond merely following a fixed path. The software stack handled the trajectory analysis of – and path-planning around – other vehicles and objects, and into available space based on real-time perception data output by the computers from processed sensor data, such that the autonomous tractor could move from the quayside and into the distances leading to the stack zone.
In addition to dealing with such traffic, the YT193 would experience dramatic changes in its inertia, and potentially also in its centre-of-gravity and -balance, after receiving and offloading containers, which heavily impacted how the steering, braking and throttle behaviours needed to be governed.
“We can go from no load to 40 tonnes on the back in an instant, so we needed to provide complete assurance that our systems would always update their driving style appropriately, irrespective of the load on the back, and we’re continuing to update that technology to make sure we have different methods of assessing and updating our driving profile based on the load we sense,” James says.
Once at its destination – typically, the end of a block of containers – it would again enter its safe state such that the reach stacker could lift the container away, thereafter making for a newly assigned crane so that the process could repeat.
Easy fixer
As mentioned, the YT193 used in P-CAL ran on a Cummins diesel. However, hydrotreated vegetable oil (HVO) was the fuel selected in its actual operations, being an increasingly popular choice across European industry for decarbonising without disrupting normal operations (because HVO is a satisfactory drop-in replacement for crude diesel in unmodified engines). It also has a far reduced impact on the health of nearby workers compared with that of diesel.

“But we, as a business, don’t mandate any kind of powertrain – we can work with different vehicles and it’s entirely a customer choice,” James says.
“Naturally, refuelling cycles are quite quick, which meant the diesel HVO machine needed little downtime compared with electric variants like the YT203EV. But as we move to demo more EV fleets, we’d only need to check with the customer on fleet sizes and how they’d want to manage lengthy recharge cycles.”
Past refuelling, appropriate maintenance for the AV included thorough cleaning of sensors and other equipment as is standard for keeping the longevity of all machinery in port environments. Logistics operators, as Oxa explains, start shifts with long checklists for potential faults, hazards or insufficiencies about the vehicles and equipment.
“And even though ports may be moving to autonomous systems, we can still expect the same level of checks for those machines, given that there’s massive workflows to be maintained in tandem with the well-being of personnel who might be on- or off-board the vehicles,” James notes.

“Beyond that, we need to make sure vehicles and electronics stay within calibrated operating bounds, and we have various tools we use within our systems to guarantee that we’re maintaining accurate calibration of the sensors, computers and so on.”
Closer connected
With the successful conclusion of P-CAL, Oxa affirms to us its full focus and commitment to industrial implementations of autonomous mobility, with ports, airports and manufacturing settings paramount among its priority markets.
“We’re continuing our work with the Port of Tyne to build our understanding of how best to deploy this technology with them, and we’re in discussions with other ports as to how we might fit into each of their sites, with background work into all the ways we can leverage the lessons and data accrued through P-CAL and its predecessors, not to mention the proof-point of having integrated seamlessly into their day-to-day operations,” James adds.
Arguably, most important among those lessons has been the development of Oxa’s capabilities to integrate with the TOS at the Port of Tyne, much of which will be transferrable to other sites. But different ports run different TOSs: some are proprietary and some use third parties of varying scale, meaning that there’ll doubtless be elements of extra work for each of them.
“Something worth keeping track of is a group called TIC 4.0 [Terminal Industry Committee 4.0], which is a cross-industry group looking at standardisation throughout ports for the specific purpose of integrating more automation and autonomy. That could help a lot with transferability and proliferation of autonomous systems across ports and shipping, so we’re tracking their work and are very interested in seeing where it goes.”
UPCOMING EVENTS



