







Landing a UAV on a ship
(Image: Beijing Institute of Technology)
A new algorithm can help quadrotor UAVs land on a moving ship more efficiently, writes Nick Flaherty.
A research team led by Tao Song, professor at the School of Aerospace Engineering at Beijing Institute of Technology, has developed a fixed-time control strategy to achieve reliable UAV landing on a manoeuvring ship.
“A quadrotor UAV is a typical underactuated system, making it difficult to simultaneously track the dynamic motion of a ship in all six degrees of freedom. To address this challenge, we developed a landing control strategy based on ship motion prediction,” said Song.
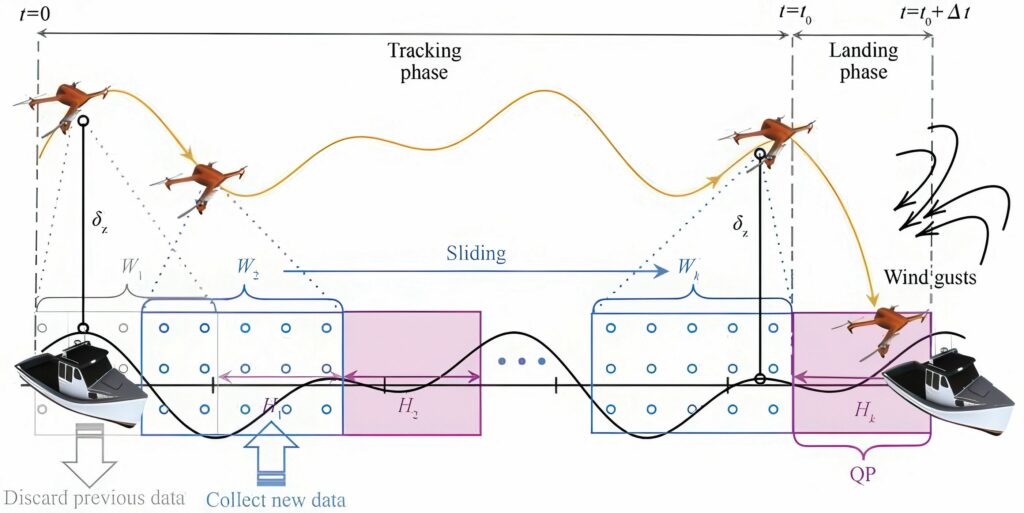
“Specifically, a Sliding Data Window–Auto-Regressive [SDW-AR] model was designed to predict the ship’s roll and pitch motions in real time, and then identify the quiescent period required for the UAV to land safely according to the prediction results. Unlike conventional fixed-structure forecast models, the SDW-AR model employs a variable-structure design. The model parameters are updated online according to the latest observed data, thus enhancing prediction accuracy by adapting to recent data trends.”
GNSS signals can be obstructed by the ship’s superstructure, jammed or spoofed, so the aim is for the algorithm to manage vision-based shipboard landing in GNSS-denied environments.
UPCOMING EVENTS








