







Skypersonic Skycopter

(Images courtesy of Skypersonic)
Pre-mission practice
Rory Jackson reports on how NASA is using these craft to train astronauts destined for the exploration of Mars
Now that the presence of water ice on Mars has been confirmed, many organizations have committed themselves to establishing a human presence on the planet – NASA in particular.
The agency hopes to drive exploration and research on Mars by creating a crewed base, although uncrewed vehicles will remain just as important – if not more so – for future missions. The Curiosity and Perseverance rover UGVs, the Ingenuity helicopter UAV and other uncrewed orbiter and lander craft have after all played vital roles in Martian photogrammetry and hydrology work to date.
Giuseppe Santangelo, CEO of Skypersonic, says NASA wants its Mars astronauts to be as well-trained as possible in the operating procedures and daily life as an uncrewed vehicle operator and technician on another planet, where the environment and geography are quite different from those on Earth.
“That means NASA needs to test its astronauts’ reactions to long periods of isolation inside a confined space similar to what the eventual Martian habitat will be like, and in the process ensure they can keep their uncrewed mapping and exploration missions going, without needing to go outside the habitat,” he says.
“So to train their teams in this kind of environment, they decided to create the CHAPEA – Crew Health and Performance Exploration Analog – project, a series of missions in which four people will spend a year inside a confined environment, dealing with the isolation and uncrewed vehicle operation elements.”
While some technologies such as radiation shielding and rotor adaptation for the Martian atmosphere fell outside the scope of this experiment, a couple of key technology requirements were deemed necessary for realistically training the astronauts in uncrewed vehicle operations on Mars.
One was a data link with exceptionally low latency. This would ensure that the GCS operators have precise updates every second on the condition and location of their exploration vehicles, and can persistently analyse all the incoming data in real time. It will also enable them to take manual control, be it for the vehicle’s safety or the operator’s points of interest.
Most important, astronauts will be unable to leave their base (be it trainees in the simulated base or actual astronauts on Mars). Unlike on Earth, where if all else fails a retrieval crew can be sent to pick up a UAV or rover, the data link will be the only useable means of contact between vehicle and operator, so the low latency and high reliability of the connection is vital.

It is unlikely, however, to be used for constant remote control. “Clearly, more autonomy is better for exploration, because it means less labour and mental burden for the astronauts, so considerable time will be spent by them just monitoring the autonomous movements of the UAV and rover, and taking note of their findings,” Santangelo explains.
“And autonomy is no longer very difficult to achieve – anyone can use 3D SLAM for instance in a UAV costing $50 – and future iterations of the Skyrover are likely to test autonomous recognition, gripping and retrieval of samples by itself. So even though early runs will be focused on manual training, they can switch to automatic and semi-automatic modes where varying degrees of functionality are given over to the UAV and rover.”
Second, there must be some means of precisely localising the vehicles wherever they are on the surface. It will be some time before GNSS constellations orbit around Mars as they do around Earth, and although the cost of launching and deploying satellites is decreasing, the expense and logistics of deploying dozens of satellites to Mars are such that a crewed base will come long before a Martian GPS.
SLAM represents an enticing solution to the localisation problem, given the independence of such algorithms from satellites or other remote infrastructure, but the number of sensors and GPUs required could place an unworkable weight and power burden on the systems. There is also no telling how well SLAM would function on the Martian terrain, where there might be a lack of suitable landmarks for Lidar and vision systems to pick up. An alternative localisation infrastructure is therefore desirable.
To ensure live remote piloting, HD video and localisation wherever the crew’s autonomous aircraft and rovers are, NASA searched the private sector for solutions, and found that US-based Skypersonic had exactly the very low latency data link (100 ms maximum) and localisation technologies it was seeking to guarantee navigation and comms reliability for terrestrial operators. Skypersonic thus won the bid to provide its systems and technology to CHAPEA without any competition.
“And while the CHAPEA Mars base will be in the Johnson Space Center, in Houston, NASA chose Mt Etna in Sicily as the ideal place for testing and operating our vehicles and technology,” Santangelo says. “The terrain there is quite analogous to what astronauts will experience on Mars.”
Preparations for CHAPEA ran through 2022, with the first missions to begin this year. Skypersonic’s vehicles and subsystems have already been trialled and validated by NASA, with the testing and examination of the company’s comms and navigation technology to be repeated and expanded upon throughout the three rounds of official CHAPEA missions to follow.
As well as being interesting operations in their own right, the missions will show how Skypersonic’s technology could give humankind new levels of insight into our closest neighbouring planet.

On Martian land and air
Two uncrewed vehicles will be used for the CHAPEA project. The first is Skypersonic’s Skycopter, the company’s flagship UAV, which is similar in design and autonomous capabilities to the Flybotix ASIO (see UST 36, February/March 2021) and the Flyability Elios.
A cage surrounds its quadrotor body for protection during indoor flight, typically during industrial inspection jobs, and Skycopters with different customisations have been created for the CHAPEA missions.
The quadrotor can incorporate numerous sensors of interest to the astronauts, including as standard a 4K camera mounted on a radio-controllable gimbal (which can record live video on an SD card or stream it live over Skypersonic’s data link) as well as a multi-gas sensor, which potentially would be interesting in the survey of gases on Etna and even on Mars. A Mirion DMC 3000 personal electronic dosimeter can also be installed for detecting radiation that might have an impact on human habitability.
To enhance the survivability (and hence practical autonomy) of the UAV, the electric motors are fully enclosed and dustproof, and six LEDs are installed around the cage to ensure illumination and navigability at night, in caves and so on.
“The first prototype of the Skycopter was created in 2015,” Santangelo says. “It was based on the idea of a drone that could roll as well as fly, and be protected by a moveable ball-shaped cage, in order to inspect enclosed spaces like sewers, chimneys and dams. As a result, it’s well-suited to inspecting geological features like lava tubes and drained river beds that can feature on Mt Etna as well as Mars.
“The Skycopter has been a mature design and commercially available since 2019, and since physically travelling to each customer to train them in its use was costly and laborious, we developed our very low latency, long-range data link technology for remote monitoring and piloting. That enables users to become familiar with our UI and FPV control of the UAV, no matter where they are in the world.”
For trialling uncrewed ground exploration as well as key physical interactions with the Etna and Mars environments, Skypersonic has also developed the Skyrover, a small four-wheeled UGV around 50 cm wide, 100 cm long, 35 cm tall, and weighing roughly 15 kg.
“This was our first time developing a rover UGV, but it was much simpler than creating the Skycopter – the Skyrover took maybe 2 months of r&d before it was ready for deployment,” Santangelo recounts.
“The Skyrover includes a periscoped camera on top of the hull for a wide FoV around the rover, and a 1.2 m robotic arm for picking up or placing objects, along with a small basket on the back for storing scientific samples or devices for surveys, experiments, localisation or other purposes. We used external suppliers like Rover Robotics for the chassis, the arm and the computer inside embedded with all our software; our technology contributions were the video cameras, encoding and transmission systems inside.
“The rover won’t necessarily go to Mars; its purpose was to train the astronauts in using a rover with the same practical functions that they’re likely to be working with on any rover they do end up using, and Skyrover is hence fit for purpose in that regard.”
Preparations for Mars

As Santangelo recounts, the first joint forays by Skypersonic and NASA began around the end of June 2022, with their teams climbing Etna for initial trial operations of both vehicles, which lasted a few weeks.
“In planning how best to validate our technology to our customer’s standards, we identified the ideal areas to fly, the patterns and routes in which to fly, and the technologies to deploy in our data link – which we call our Real-Time Remote Piloting platform,” Santangelo says.
“The link can run on any kind of internet connection. The core of the technology are our algorithms for data packet handling that ensure high fidelity and low latency, so investigating different carriers was important here.
“In the end we went with Starlink, which turned out to be very reliable and easy to install: it’s practically just a click or two and you’re ready to go. In general, we found internet connections based on LEO satellites to be the best, as you can pick up the satellites very quickly, you don’t have to be within a specific clear view of a satellite.”

After testing the internet technologies, Skypersonic identified geographical features on Etna such as craters and lava tubes that will be analogous to key features of the Martian terrain that astronauts will want to explore with their uncrewed systems.
“Mars has a reservoir of liquid saltwater under its south pole, and undoubtedly had water on its surface and in its atmosphere before losing its magnetic field aeons ago,” Santangelo says. “As well as investigating just how much water there is on Mars now, the science community and the space industry – like NASA – want to better understand the hydrological and geological processes of the planet that have influenced the movement of water, mountains, valleys and other features of Martian geography.”
Also, when the time comes for the official Mars missions, Skypersonic is contracted to provide training for the astronauts in the use of these systems. As well as hands-on instruction with the GCS and UI in planning and monitoring autonomous missions, this will involve many hours with a simulator program Skypersonic has developed, in which users monitor and interact with a digital twin of real-world environments visualised as if through the live HD video feed from the Skycopter and rover.
“While we will be unable to communicate with them, as that would breach the isolation condition of the project, they will have both the GCSs and the simulator software, and can therefore keep training themselves when not performing operations directly with the UAV and rover in the real world,” Santangelo adds.
Through the GCS, the astronauts will also remotely run through pre-launch checklists for the health status of the vehicles’ subsystems, as direct visual inspections will be impossible. Santangelo notes that either vehicle can set off effectively from anywhere so long as Etna is not generating an earthquake or eruption, as the vibrations from these will destabilise the accelerometers’ pre-calibrations and hence inhibit safe flight.
“And of course, the data link must be checked and validated that jitter, latency and network capabilities in general are solid through one of the diagnostics routines we’ve developed. We can do either a speed test that takes a few minutes or a more extensive test that runs for a few hours,” Santangelo says.
Real-time monitoring and control

As a result of the data link and software, the end-user receives both FPV and gimballed camera video feeds at their GCS with high frame rates and resolution. This enables clear views of the features across Etna’s terrain, including craters, plains and the Skyrover.
“As the rover moves around Etna, it operates on a version of ROS that we modified to incorporate our core software, to ensure that the video transmission and remote control can typically be achieved within 50 ms of latency,” Santangelo says.
“That latency maybe isn’t quite as necessary for the rover as it is for the UAV – since you’re on the ground you’re at less risk of crashing – but since we can achieve our low latencies without prohibitive cost for the astronauts, it didn’t make sense not to include it, so we’re ensuring that they see what the UGV sees in real time.”
As mentioned, the data link can use any internet or cellular connection. The system could have used 4G for instance, although the latencies would have increased, or 5G depending on the reliability of the signal.
Santangelo explains that there are three layers to determining data link latency. The first is physics: for example, latencies will (probably) never be lower than light, which travels at nearly 300,000 km/s, so there will (probably) always be at least 10 ms of latency from uncrewed vehicle to GCS.
The next is infrastructure, such as optical fibres and antennas. As a rule of thumb, Santangelo estimates that this multiplies the physics limitation by at least three, giving a minimum of 30 ms latency with currently available infrastructure technology.
“The last key layer is the hardware and software stack, which is by far the biggest contributor to video and telemetry link latencies nowadays,” he says.
Data processing algorithms must be heavily refined to be able to transmit large quantities of data such as HD video and other telemetry from the Skycopter or Skyrover in one direction while sending command signals from the GCS. The fidelity and latency of both sets of traffic are therefore key proof points being watched during the project.
Localisation
The versions of the Skycopter for the NASA project fly with a slightly longer (though variable) endurance compared with the standard-issue 14 minutes, as one of its modifications for CHAPEA includes a specifically lightened cage for increased flight times.
“With regular customers, we recommend flights of no more than 10 minutes so that they’re never at risk of losing power in mid-air, and with the Mars analog project our UAVs tend to fly for 15 minutes,” Santangelo says. “The rover by contrast can operate for up to 2 hours continuously, by virtue of integrating a bigger battery pack and not needing to constantly run four electric motors or fly up and down.
“That said, the Mars mission preparations will put more emphasis on Skycopter flights into the lava tubes than sending the rover into them, as it’s actually safer for the UAV to do it than risk the UGV falling off underground cliffs.”
While the data links between astronaut and uncrewed vehicle can be supported through a reasonably small network of orbital satellites, be it over Earth or Mars, GNSS as mentioned will probably not be available on Mars for at least a few decades.

As an alternative solution, Skypersonic’s Skyloc was developed in 2016 and consists of a series of beacons integrating ultrawideband technology, transmitting pulses at 6-9 GHz. This high frequency enables measurement of the distance between beacons through simple ping and response signals, which are accurate to a few millimetres.
Such 3D triangulation concepts are already known as real-time locating systems (RTLSs) and are used in industrial contexts such as warehouses, hence Skypersonic’s use of it for the industrially focused Skycopter missions.
Santangelo notes that SLAM might have been used instead as a localisation method, and might actually be less costly than an RTLS. However, RTLSs have been deployed widely since the early 1990s, and have therefore had far more hours of use to prove their reliability than SLAM. They also allow more real-time verification of integrity of course, since individual beacons can check each other; SLAM currently lacks this kind of internal verification.
In future, the Skyloc beacons could be installed on the Skycopter and Skyrover, with the UGV’s basket and arm enabling it to carry and place beacons throughout Etna, as the Mars rovers will eventually do. Through this, personnel can monitor the UAV’s latitude and longitude in real time, just as they would with GNSS.
Autonomous recharging
When the range as dictated by battery energy is reached, the Skycopter will either transmit a warning to the astronauts that the system must return to its base for charging, or a failsafe function might be activated to force it to perform an automatic ‘return to base’ flight using GNSS to guarantee a precise route home.
As discussed, the Skycopter and Skyrover will be extremely far away from the CHAPEA astronauts, who will be isolated inside their base and so could not carry out maintenance on the vehicles even if they were allowed to leave the base. As a result, solutions for autonomous charging will probably be used.
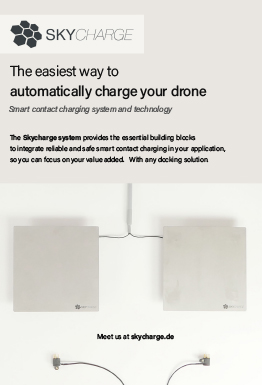
One solution hypothesised by Skypersonic, which has experimented with autonomous charging concepts, includes that from the aptly named Skycharge, in Germany, which produces a conductive charging pad with multiple tiles that can be individually charged depending on where the UAV and its strut-mounted power inputs land. Combining such a system with solar panels could enable self-sustaining autonomous charging systems on Mars.
The vehicles themselves might even take forms that are useful for energy security, including the use of the Skyrover as a wireless charging platform for the Skycopter to land on, effectively turning the former into a mobile range extender.
Future plans
Upcoming trials of Skypersonic’s technology through CHAPEA (scheduled for 2023, ’25 and ’26) and related missions will see it delivered to more distant locations. Santangelo explains, “There is a reason we designed the Skyrover to be so small, especially compared with the Perseverance Mars rover – it has to be carried and transported around the world, because we’re set to use it in many other places around the world, not just on Mt Etna.
“So NASA will be validating our remote piloting solution link through operations of Skyrover and Skycopter in different locales relative to the CHAPEA base, to verify that it really will provide very low-latency HD video and control, no matter where their uncrewed systems are on Mars, when that day finally comes.”
Although Skypersonic’s main focus until now has been indoor industrial inspections, its recent and upcoming work with NASA is spurring it to look more towards how its UAV technology can be used in space missions.
“Any planet with an atmosphere could theoretically be explored with UAVs, be it Mars, Venus or maybe even the gas giants,” Santangelo says. “To that end we’re now working on a system called Stratocopter, a rotary UAV designed for hovering in extremely thin atmospheres such as 30 km above Earth.
“That isn’t complicated to achieve, aside from the issue of battery energy densities, and UAVs operating in the stratosphere can substitute or supplement satellites, or fly in the thin atmosphere of Mars.
“Combine that with, say, a network of relatively stationary balloons about 30-40 km up, with thin-film solar panels on their tops to power landing pads and charging stations hanging underneath, and the Stratocopter could repeatedly land, recharge and launch to provide persistent high-altitude surveillance or comms relays.”
UPCOMING EVENTS








