







INNengine Rex-B

Rory Jackson reveals how this cam-operated two-stroke axial engine has been developed for the UAV market
In the young world of uncrewed systems, propulsion systems inevitably draw primarily on established technology. At the same time, the industry’s lack of maturity means there are plenty of projects exploiting today’s high-tech design and development tools to explore out-of-the box concepts. While many will ultimately fall by the wayside, we feel it is our duty to inform readers of any that make it beyond the conceptual stage, to thereby promote discussion of technologies that might one day prove genuinely disruptive.
One such project is INNengine’s naturally aspirated 125 or 288 cc four-cylinder two-stroke for the UAV market, which exploits the axial cam concept for a package that is notably light and compact. This is an old technological approach that has been successfully applied in secret military roles but is virtually unknown in the civilian world.
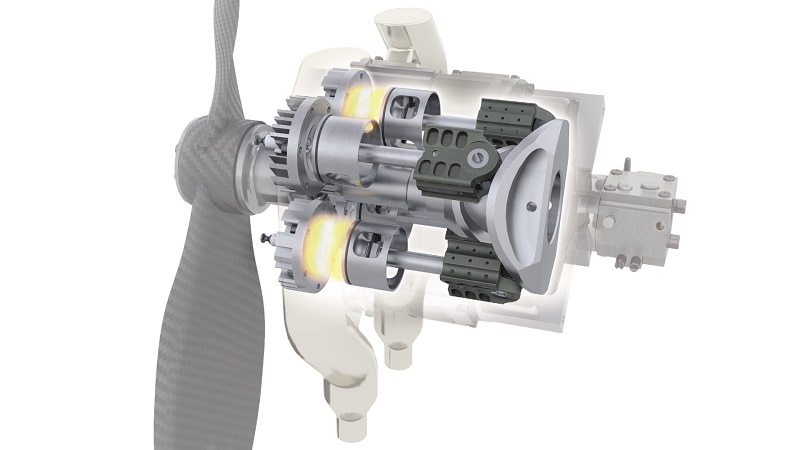
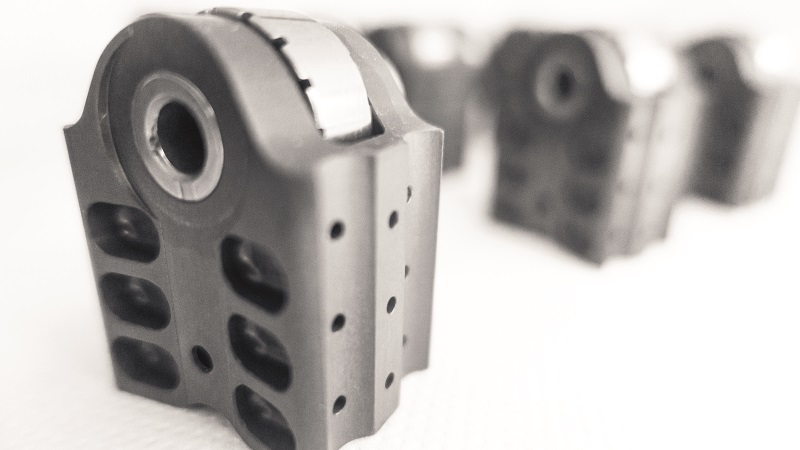
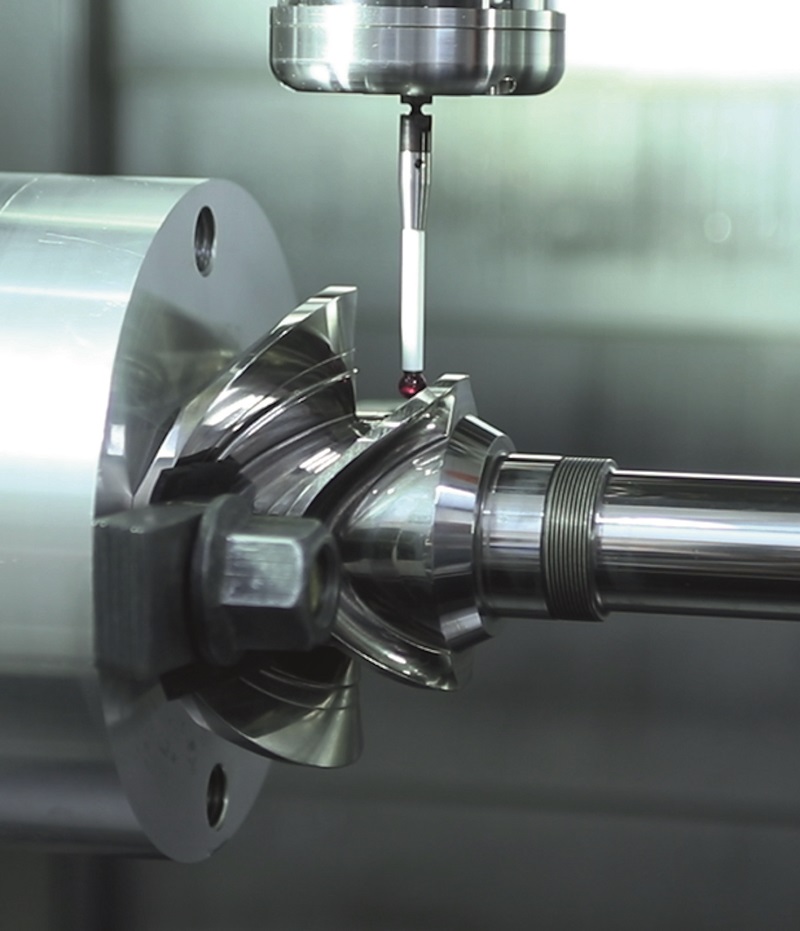
It means that the four cylinders all run parallel with the output shaft, and they are arranged evenly around that shaft (at 90o intervals). The drive is then imparted from the pistons to the driveshaft via a disc integral with the shaft that carries a 3D sinusoidal cam track. The disc, cam track and the shaft are all machined together as a single component (visible in its position in the middle of the cylinders in the anatomical diagram on page 73, and in the photograph on page 78).
It should be made clear that, driven directly by the four piston assemblies via rollers, the disc is an alternative to a swashplate that might otherwise be used in such an engine. Here the piston consists of upper and lower tiers, which are rigidly connected by a rod; the upper tier is a ‘head’ largely consistent in form with a conventional piston, while the lower tier is a ‘body’ carrying the roller mechanism that runs in the cam track to drive it.

The 3D cam track’s sinusoidal shape features two crests and two troughs, each crest spaced evenly around the circular track at 180o (and the same for the troughs). This means that, across the four cylinders (numbering them from 1 to 4 clockwise for reference purposes), cylinder 1 and 3’s pistons will be at TDC while 2 and 4’s will be at BDC, giving it a firing order that INNengine styles as (1+3) and (2+4).
It also means this sequence occurs twice per revolution of the output shaft. In other words, each piston strokes four times per shaft revolution, giving this two-stroke four a total of eight combustion events per revolution.
Air first enters the engine through an inlet at the back, passing initially into a chamber machined into the back of the 3D cam track, inside which the fuel injectors also sit, making this chamber analogous to a typical two-stroke crankcase, in that fuel and air meet here before being drawn into the cylinders.
Transfer ports run from this intake chamber to each cylinder, allowing the top end of each (and by extension, the engine’s scavenging and exhaust) to operate as per a normal, crankcase compression, two-stroke cylinder. Replacing the crankshaft of a four-cylinder two-stroke by a cam track and attendant axial configuration in this manner makes for a very compact and relatively light engine with consequently high power density.
Indeed, INNengine claims to have produced the most gravimetrically power-dense UAV engine we have ever seen. At the time of writing, its fuel efficiency and durability had yet to be confirmed, although the inherent lack of piston side forces promises to lower friction and wear, as does the elimination of a conventional four-cylinder engine crankshaft.
Background
Arguably the scarcity of axial cam engines has been due to either insufficient technological advances in design tools and CNC machining to precisely and consistently manufacture power cams capable of smooth, low-vibration power output, or difficulty in producing them in quantities large enough for commercial or military aircraft operators.
INNengine understands these problems, and has been tackling them over the past several years from its base in Spain. In addition to optimising the designs of its cam engines, the company has been manufacturing its components to meet the orders and maintenance requirements from professional vehicle manufacturers.

At the time of writing, two engines were being offered by the company, each with a different design but centred on cam power. The first concepts originated from research about 8 years ago, the first result being an engine now designated the E-Rex and to be supplied to the automotive and advanced air mobility industries. Here we will focus on the spin-off UAV-oriented E-Rex.
The E-Rex was invented by Juan Garrido Requena, co-founder and project manager at INNengine, who developed and prototyped the concept through the final thesis project of his bachelor’s degree in Mechanical Engineering, but he had considered engine architectures since his childhood, out of a passion for karting and later interests in two-stroke motorcycles and RC aircraft.
Ruben Garrido Requena, business director at INNengine, recounts, “Even when we were 9 or 10 years old, we were already taking engines apart and playing around with them, and by the age of 12 Ruben had built his own kart but was more interested in making a faster and more efficient engine.”
After a series of iterations and arriving at the architecture described above, Juan continued optimising the E-Rex design for another 8 years or so, until he and Manuel Luna Manu (mechanical and electronics engineer at INNengine) felt the time was right to spin-off a version of the engine for RC aircraft.
That soon turned into a version called the Rex-B, a 125 cc two-stroke axial engine measuring 21 cm long, 15 cm in height and diameter, and 4.6 kg in weight, producing 21.5 bhp (16 kW) at 6000 rpm. As the design is scalable, however, INNengine has also briefly shown a 288 cc version 27 cm long, 19 cm tall and wide, and weighing 9 kg. That version develops 55 bhp at 6000 rpm, and the company plans to integrate a 20 kW motor/generator into it.

Testing and performance
“The Rex-B was originally meant just for RC aircraft, but we soon discovered that the engine needed a large displacement to be worth it,” Ruben explains.
“Also, the axial shape of the engine means a linear factor increase in its total size and weight gives a quadratic order increase in displacement and hence power output.
“So making 20-40 cc engines for RC made no sense. In fact, 125 cc is the smallest we feel the Rex-B should be for it to still be a significant value proposition for small aviation craft, but we realise that’s a bit too big for RC.”
However, customers from the UAV manufacturing and integration sector heard about the engine and began approaching INNengine, to the point that the company paused its plans to promote it for general RC and is now focused on optimising it for professional UAVs.

The first designs of the Rex-B were simulated and validated in CAD, using dynamometer and other test bench data on the E-Rex as a foundation.
“Then we built a prototype and a test rig for it, and cycled it against simultaneous tests of a DLE Engines model with identical propellers on both to compare and map power and torque over speed,” Manu adds. “And although we’re now ready for manufacturing with the second Rex-B prototype we also want to find a professional dyno small enough to run further tests on it.
“We’ve also validated both the 125 cc and 288 cc versions to the point that we’re satisfied that larger versions will scale well. Given that more than doubling the smaller Rex-B’s displacement meant just a 2 cm increase in radius, quite large UAVs could run on it. It has a mechanical simplicity thanks to its two-stroke cylinder configurations that we feel the UAV industry will want more than the E-Rex’s complexity [being an opposed-piston, uniflow-scavenged and far heavier engine].”
Tests have confirmed that the engine can continue running if power from up to two cylinders is cut, with just one opposed pair of cylinders or just one from either pair still working.
“We’re still mapping the fuel consumption, but we are finding better SFCs at lower rpm than 6000 rpm; we’re having to explain that to many prospective customers,” Ruben muses.
“All of them want the maximum performance with the maximum efficiency, but like a roadcar capable of 200 bhp, it only uses that maximum power when it’s going flat out or uphill with a full trunk, which you don’t do for 8 hours straight. If you are coupling the engine with a constant-rpm generator you should choose a lower power demand.
The UAV’s full power is for take-off at maximum payload capacity. Cruising efficiency will be somewhere below that, and if users want higher efficiency with higher power, they can have that: they just need a bigger Rex-B, with cylinders that can breathe better.”
Intake
Manu explains that the Rex-B uses port injection with commonplace saturated injectors chosen for high impedance, which typically spray at about 3.5 bar.
Juan adds, “We’re using standard 50:1 two-stroke pre-mix gasoline at the moment, but we’re planning an update to the Rex-B that will feature a dedicated oiling system, lossless and contained in the upper cam track where the piston’s rollers [called cam followers by INNengine] make contact with the cam.
“At that point, the ratio of fuel to oil will greatly increase as only a tiny amount of oil will be needed in the fuel, just for lubricating the liner via the piston ring.
“And because each piston strokes four times per shaft revolution, compression and expansion happen in half the time of usual gasoline two-strokes, meaning less time to lose compression in the cylinder, so we’ve found one piston ring is sufficient per cylinder.”
Two holes are drilled into opposing sides of the cam track, so as it rotates the air passes through the holes into channels running in the outer sides of the cylinders – effectively serving as transfer ports, with three per cylinder – to each pair of cylinders. The mixing chamber is opened to each pair of cylinders’ inlet ports during their pistons’ downstrokes for effective scavenging.
The guide plate for keeping the rollers aligned with the track is fixed between the cylinders and upper engine block (see Anatomy) to hold the rods in place, and has apertures for transferring the air-fuel mixture to the cylinder inlets; carbon reed valves are fixed to these apertures. The cam followers are designed with hollows that also form part of the transfer port; this contact with the air-fuel mixture means they are directly lubricated and cooled, and deposit oil against the cam tracks as they run in them.
“We’ve also designed the transfer ports and sized the cylinders in such a way that there’s no dead space in the engine,” Manu explains.
“Some crankcases use attachments inside to reduce dead space for faster response. Many of the Rex-B’s advantages come not from the two combustions per rev, but reducing dead space for air travel, which increases our maximum rpm, reduces vibrations, and eases cooling.”
Engine management
Having a combustion event occur in one pair of cylinders with every 90o rotation of the shaft makes for a highly reactive engine, although INNengine has some tricks to monitor and manage the engine via the ECU.
“We’ve used phonic wheels in the past, but we’re now using a system of two magnets, spaced 180° apart about the shaft,” Ruben explains. “A sensor linked to the ECU detects those magnets’ passes, and that makes the ECU think the engine is running twice as fast as it actually is.
“That allows us to run a very normal two-stroke management system in the ECU, despite the extra number of combustion events per shaft rotation that we have. It also minimises the amount of new programming we have to do, and prevents end-users from having to familiarise themselves with software they’ve had no experience with to work on our engine.”
The ECU hardware is designed and assembled in-house by Manu (with a Bosch Motronic unit used for the timing and power of the CDI ignition system), embedded with an open source speed density algorithm.
CM-6 spark plugs are installed, one in the centre of each cylinder head, although INNengine is designing an update for dual spark plug integration, as standard in UAV engines.
Cam power
The cam followers roll against the cam track for a very low friction, low vibration and low-temperature transfer of the pistons’ linear force into the rotation of the cam track and shaft.
“Just as a crankshaft has kinematics, we have our own, dictated by the curvature of the cam lobes,” Juan explains.
“The geometry of the cam track is calculated as a derivative function of factors like the piston stroke length and the engine speed,” he says. “That means we always end up using simple harmonic [sinusoidal] curves. When the roller reaches the top of a lobe curve, its over-acceleration reaches zero, creating the perfect, low-vibration condition for the next combustion event to push the roller down the downward slant past the apex of the curve.

“Both the rollers and cam tracks are made from hardened and treated steel, and very smooth and lubricated enough to enable the rollers to run for hundreds of hours in what is essentially a curving raceway, as in a bearing. We just have some proprietary parameters in cam geometry and roller size we need to adhere to for efficient power output and engine life.”
As mentioned, a second cam track is designed onto the shaft, a few centimetres forward from the main cam track. The second track is theoretically never used during normal operations, but if engine power should cut off suddenly while running at very high rpm, to the point that the inertial forces exceed the inner pressure, the second track acts as a ‘brake’, catching the cam followers to prevent the pistons crashing upwards.
“It’s a very particular and unexpected situation, but we know that users are going to put engines through conditions we would never think of trying during in-house dyno testing, so it’s good to have that to prevent damage in that extreme circumstance,” Ruben comments.
A range of exhaust and muffler attachments can be used to suit different airframes and integrations. At the time of writing, INNengine was testing a couple of custom-designed systems in which each cylinder has its own exhaust pipe and manifold to prevent interference between each cylinder as it scavenges.
“But while it’s common for each cylinder in a two-stroke to have its own exhaust, there aren’t many two-strokes out there in which two cylinders fire at once,” Ruben says. “So we’re working on designs with two exhaust manifolds instead of four, to see if we can reduce part count and weight while keeping the same power output.”
Air cooling
Although the engine is cooled passively by airflow, major design choices have been made to minimise the creation and propagation of hotspots. As mentioned, all four cylinder heads point forward, which (ideally) positions their cooling fins in the direction of the airflow coming from the propellers and the forward motion of the aircraft.
“That of course also means the hottest parts of the engine – the cylinder heads – are completely exposed to the airflow,” Juan says. “When you cycle a multi-cylinder inline, vee or boxer engine to failure, almost always the cylinder that fails is the one at the back, because any air reaching it has already been heated by the forward cylinders.
“We don’t get that issue, nor even any differential in coolant air temperatures, because all four cylinders are equally exposed to the air and hence equally cooled.”
Also, while some two-stroke UAV engines have their cylinders and heads manufactured together as a single part, INNengine avoids that for thermal management reasons. By keeping the head separate from the rest of the cylinder, with a standard sheet gasket between the two, thermal conductivity from the head down into the engine is minimised, confining most heat to the cylinder head where it can be dissipated by propeller downwash.
While that air flows around the engine, and hence tends to cool the outer portions of the cylinder heads and cylinders more than their inner sections and walls, the transfer ports are shaped such that the charge enters the combustion chamber from the inner walls of the cylinders – that is, from the sides facing the shaft.
The inner parts of the cylinders and heads are therefore cooled by the charge to offset the thermal differential between the outer and inner wall areas. Also, the portion of each transfer port where the reed valve sits is deliberately positioned close to the exhaust gas outlet to cool the surrounding metals.
Conclusions
Readers familiar with normal crankcase compression, crankshaft-operated engines but unfamiliar with axial engines will no doubt have questions over some aspects of the Rex-B’s performance.
For one, some may feel that using a sinusoidal cam and rollers to convert linear piston strokes into shaft rotations could make Rex-B seem less inherently reliable than normal UAV engines using con rods and a crankshaft (while some might argue the opposite). In any case, INNengine claims having tested the Rex-B to a 500 hour TBO threshold, and anticipates being able to prove it out to 1500 hours between overhauls (and plans to certify the engine going forwards).
This lifespan can be attributed to its mechanical simplicity and low number of parts. Granted, two-strokes are inherently simple; however, in the Rex-B for instance the cam track, output shaft and air-fuel intake chamber are all one part, rather than having a separate crankcase and crankshaft, each typically being made of multiple parts, as is typical in UAV engines.

Interactions between rollers and a cam track might however present a source of wear in cam engines, particularly if loft and bounce of the rollers are not controlled for. Instead, the Rex-B’s rollers run in constant contact with the cam track – no lifting off from the crests or bouncing occurs as combustions triggered by the ECU-controlled ignition timing cause the piston’s head and body to thrust downwards as appropriate.
In addition to this constant contact, the metals in both the roller and cam track are treated, lubricated and thermally managed with the aim of minimising wear, and a secondary cam and a guide plate sit above the rollers to physically block excess upward movement, such that INNengine uses the analogy of balls in a bearing to describe the relationship between the Rex-B’s rollers and its cam track.
A question remains over the efficiency of the engine, particularly regarding how efficiently the cam and roller system converts combustion power into shaft motion via the cam track (especially amid reaction forces at the cam-roller interface, which may be large and impact efficiency given the shallow angles at some points), and therefore the amount of fuel it consumes relative to power output at peak or cruise rpm. INNengine has yet to publish SFC figures.
On efficiency, Ruben comments, “Rex-B’s kinematic curve shows similar conversion of combustion energy into rotational force as crank engines. And net output favours the cam’s due to lower friction losses: the contact areas for our conversion are further from combustions, in cooler and more oiled areas.”
Objective advantages of the engine include an inherently compact cylindrical shape (owing to the arrangement of the cylinders in parallel around the output shaft, rather than at right angles to the shaft as in radial, flat and inline engines).
That, combined with the number of combustions per shaft revolution, give it high ratios of power to weight and to size. The two-stroke spark-ignited engines we have previously featured rarely exceeded 3 kW/kg.
As some examples, we have covered a 2.5 kg engine displacing 100 cc and producing 7.3 kW, a 3 kg engine displacing 116 cc and outputting 8.4 kW, a 28 kg engine displacing 548 cc and producing 36 kW, and a 50 kg engine displacing 578 cc and outputting 164 kW.
As a reminder, the 125 cc Rex-B weighs 4.6 kg and produces 16 kW, while the 288 cc version weighs 9 kg, so if INNengine’s claims are accurate, the 288 cc Rex-B is the most gravimetrically power-dense UAV engine we have encountered. At the time of writing though, insufficient data is available from UAV engine companies for a comparison of volumetric power densities.
Juan notes though,“It’s not only about power. We have higher torque relative to power than most; our pilot test clients are actually finding that desirable for applications like hydraulic pumps and power generators.
“Our piston linear speeds can be higher than in conventional engines, as lateral load is moved from the piston head to the piston body, where lubrication is abundant and heat is lower. And even if linear speed stays the same, our other moving parts move more slowly, reducing friction and improving efficiency, durability and reliability.”
As a last benefit to note, the Rex-B’s vibration profile benefits from the elimination of second-order vibrations, given the absence of traditional big-end journals swinging the piston from side to side. The guide plate also holds the piston rods in place to prevent the limited sideways motion that could otherwise occur as the rollers run in the cams.
Future plans
Going forward, INNengine plans to continue producing and optimising trial units of the Rex-B and E-Rex in-house to court customer and partner interest.
INNengine also plans to run its engines on green fuels including hydrogen to see how its engines could enable sustainable aviation and road transport without the power and energy losses of going fully electric.
Anatomy
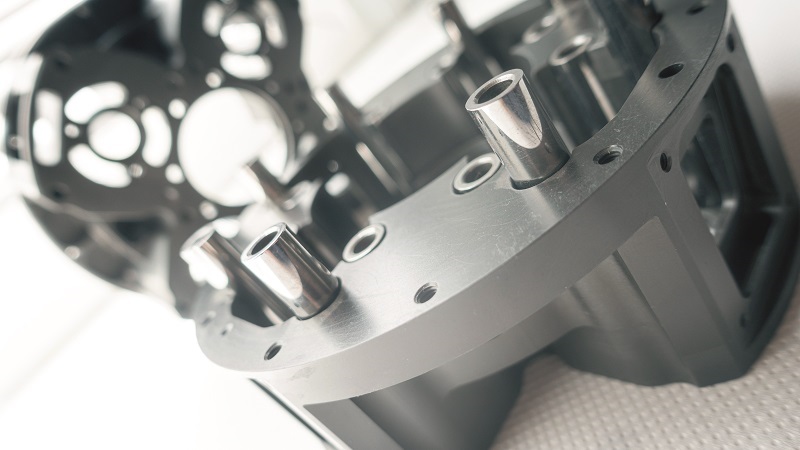
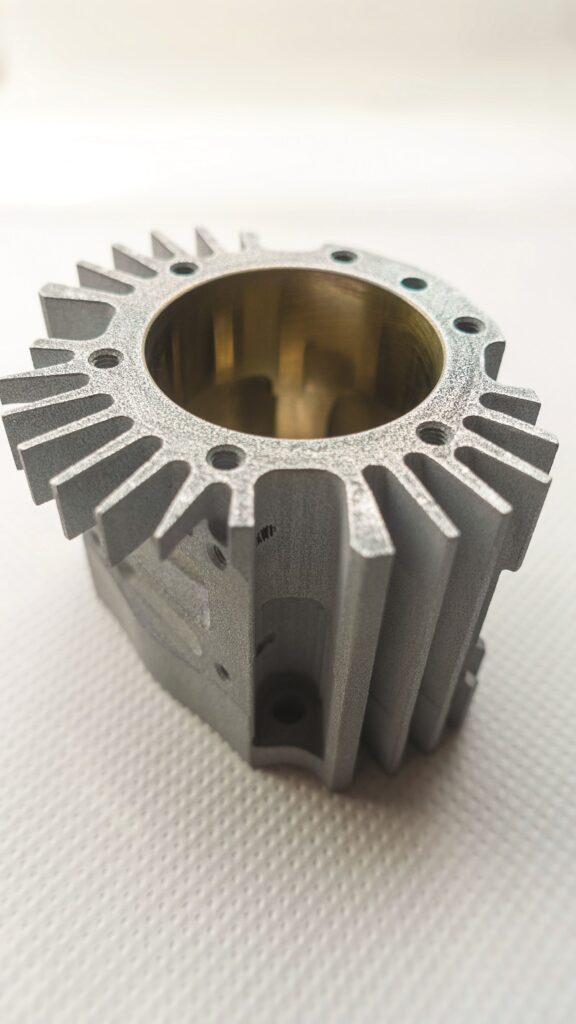
The Rex-B’s engine block is cut in two parts – a lower section called the ‘sump’ that serves as a structural base and air manifold, and an upper section analogous to a crankcase (in that it surrounds the shaft) on top of which sit the cylinders. The sump and upper section are made from 7075-T6 aluminium billet and hard anodised, then held together with the cylinders and cylinder heads by 16 small rods (four per cylinder) that are made from hardened, rectified and superfinished steel.
The four cylinder heads are precision CNC-machined from aerospace-grade 6082 T6 aluminium, INNengine forgoing casting to avoid any porosities from cast parts and ensure internal control over production.
The cylinders are similarly CNC-machined from T6 aluminium, before being coated internally with 70-80 µm of nickel silicon carbide that is then burnished. In future, however, the cylinders and heads will be cast by a third party for production at scale, potentially using another aluminium to maintain similar thermal conductivity in the finished products post-casting.
The pistons are precision machine-cut from 7075 aluminium, and are untreated as they are not load-bearing and only experience friction at the piston ring. The pistons are cut with a truncated conical shape, and with a slightly ovular geometry, as INNengine has found that internal temperature differentials cause the pistons to expand slightly more at the crown than at the skirt.
Machining them in this way therefore prevents deformation and friction at the crown over time. The crown is otherwise symmetrical, as the absence of a crankshaft means minimal second-order (side to side) movements of the pistons occur.
The rods are cut from the same material, untreated and fastened via a single piston pin and circlip. The piston body is given an undisclosed treatment to endure friction from the guide plate and from the roller and cam track.
While much of the particulars about the cam track and shaft component are proprietary information, INNengine does say they are cut from a hardened and spring-tempered steel.
A nine-axis CNC machine is used ,along with selected suppression of acceleration profiles over standard CNC programs to achieve the exact curvature of the cam track. After cutting the part, it is low-temperature nitrided and superfinished to improve the hardness, corrosion resistance and smoothness of its surface. Although the cylinders and heads might be cast in the future, INNengine anticipates keeping cam track and shaft production in-house to protect its IP.
Specifications
Rex-B
- Two-stroke (with two combustion events per shaft rotation)
- Cam-driven engine
- Gasoline (with 50:1 pre-mix, existing version, or 400:1, new lubrication system)
- Spark-ignited
- ECU
- EFI or carburetted
- Naturally aspirated
- Air-cooled
- Schnuerle scavenged
125 cc version
- Gasoline (with 50:1 pre-mix)
- Bore x stroke: 40 x 25 mm
- Weight: 4.6 kg
- Dimensions: 214 x 146 x 146 mm
- Maximum continuous power output: 21.5 bhp (16 kW) at 6000 rpm
- Maximum continuous torque: 27 Nm
- TBO: in progress (threshold is 500 hours, goal is 1500)
288 cc version
- Gasoline (with 400:1 pre-mix)
- Bore x stroke: TBD
- Weight: 9 kg
- Dimensions: 269 x 188 x 188 mm
- Maximum power output: 55 bhp (41 kW) at 6000 rpm
- Electric power output: 20 kW
- Maximum continuous torque: 68.2 Nm
- TBO: In progress (threshold is 500 hours, goal is 1500)
UPCOMING EVENTS








