







Geospatial surveys

(Courtesy of aeroDCS)
Looking good
Advances in uncrewed systems mean they are now better than crewed vehicles for collecting geospatial data. Rory Jackson looks at some of the latest on the market
In this age of data, efficiency is everything – both the efficiency that organisations derive from analysing the data, and the efficiency of collecting it. For those with geographical assets that need rolling maintenance or projects that need to be constantly monitored for progress, uncrewed systems now surpass human-piloted vehicles as tools for collecting geospatial data. They are less costly and labour-intensive to operate than crewed aircraft and boats, they can work for longer than people, and they almost universally produce lower emissions.
Energy infrastructure
A huge range of autonomous systems and components are now available for anyone looking for efficient ways of mapping and inspecting assets of interest. Inspecting power lines and pipelines for instance comes with a number of critical requirements that an uncrewed vehicle must be able to satisfy, the most obvious being a long endurance and flight range to cover the distances of such infrastructures.
There are therefore many new aircraft designs that are optimised for achieving such endurances. The Air Barrow from aeroDCS for one is designed with a blended wing body architecture for stable flight over long distances, and is fitted with seven electric motors – one in tractor configuration for forward flight and six vertically disposed motors for enabling a stable hover above points requiring particularly close inspection.
“This VTOL-capable UAV is also powered by a hydrogen fuel cell with two, 9 litre onboard hydrogen tanks and 6.2 kWh worth of hydrogen gas, through which it is capable of up to 10 hours of flight and 478 nautical miles,” says Axel Konig, managing director of aeroDCS.
(Courtesy of Orthodrone)
“The fuel cell is a 2.4 kW system from Intelligent Energy, used in a range extender configuration, and we can integrate up to 5 kg of payload sensors for geospatial surveys, including EO cameras, hyperspectral cameras, Lidars and anything else our clients might need.”
The company’s standard choice of EO camera is a Sony RX1R. It weighs 480 g and produces 7952 x 5304 pixel images, while a Micasense Altum is used for hyperspectral imaging to capture images in the blue, green and red spectral bands with resolutions of 248 x 1544 pixels. For Lidar missions the Air Barrow typically carries a YellowScan Mapper, which scans at 240,000 Hz and weighs 1.8 kg (and can also integrate a 19.8 MP EO camera for fused visual and Lidar point data).
It has an MTOW of 24.897 kg to conform to Part 107 and similar standards. It is capable of up to 63.17 knots with a stall speed of 32.39 knots (although as mentioned it can switch to hover in the air), and a 132 Wh battery is installed for voltage balancing and back-up power.
“The blended wing body has a 2.987m wingspan and is 1.5 m across, and its aerodynamic shape means it takes very little energy to fly,” Konig adds.
In addition to flight time and efficiency, sensor stability is vital to infrastructure surveys, and Orthodrone’s eponymous UAS is optimised for that, with its rotor arms capable of rotating about its body to offset wind-related disturbances that would otherwise disrupt the 2D and 3D data being captured by its sensors.
“We are now doing mixed-sensor surveys of wind farms, through which we’re able to create synergetic Lidar and photogrammetry data sets,” explains Juri Klusak, CEO of Orthodrone.
“Integrating up to two metric, medium-format cameras with a survey-grade Lidar payload means we can capture Lidar data and photogrammetry data at the same time. Combining the millimetre-level resolution of our structure-from-motion models with the vegetation penetration of our Lidar cloud, the resulting model has both passive and active near-surface remote sensing.
“That is important, because most critical infrastructure surveys rely on several separate data sets: general mapping or change detection, vegetation management and inspection. These jobs all used to rely on different data sets to get the job done, but our solution is based on a single merged model that can be acquired with just one flight.”

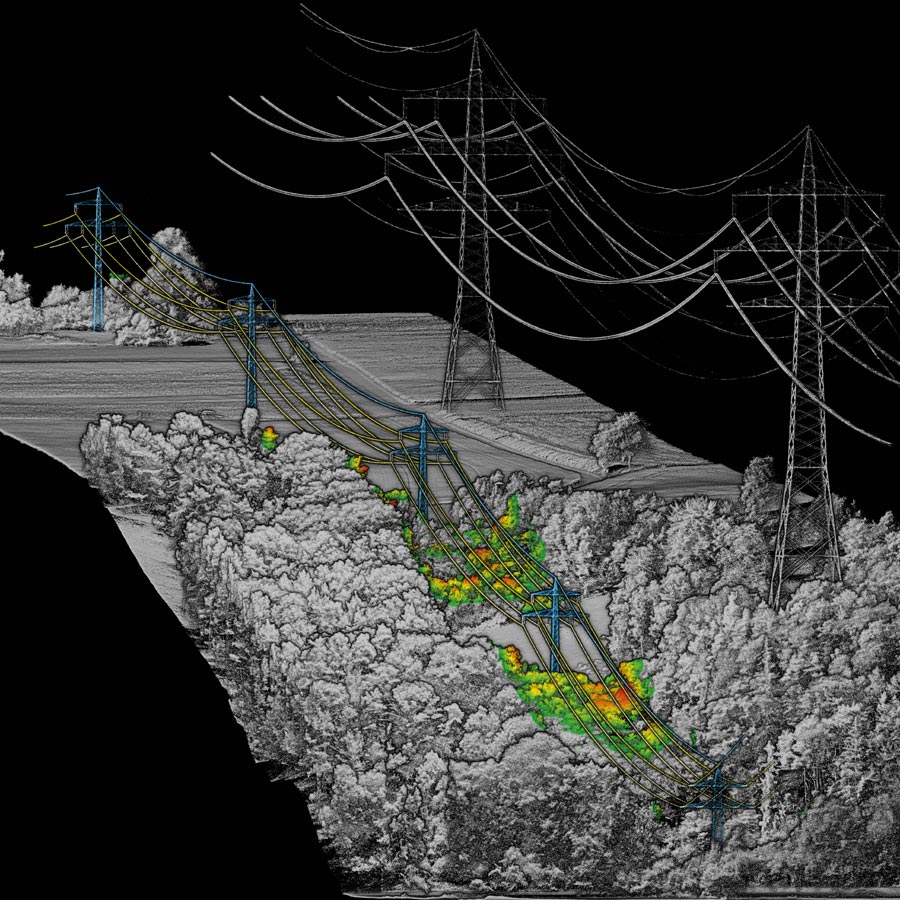
That enables Orthodrone to provide critical 3D mapping analysis for terrestrial wind farm planning, as well as encroachment surveys of any vegetation getting too close to energy infrastructure such as power lines. The Lidar provides critical penetration measurements through branches and bushes towards the ground, and the cameras provide high-resolution colour data for artificial structures.
“The Lidar also captures detail where the structure-from-motion photogrammetry can reach its limits, such as around the shiny white surfaces of a wind turbine where the reflectance would otherwise impact the model quality,” Klusak adds.
“There are further tricks we can perform using our software. For example, in powerline mapping, we can buffer and colour-code the surrounding vegetation to show end-users how close the leaves are getting; anything red or maybe orange is where they need to start trimming to prevent contact with the cables.
“We’ve also carried out photogrammetry on the side of a dam, with a resolution of 0.5 mm that enables us to see every single stone and crack. That is really important for the dam operators when they want to survey for change detection to see where damage is accumulating over time.”
Ice exploration
As well as measuring for changes in infrastructure qualities over time, geospatial data can provide crucial real-time information for explorers in extreme environments. Orthodrone has for instance used its aforementioned UAS to survey the ice around shipping routes for reflectance values (using a Riegl Lidar payload), with the resulting reflectivity analysis providing actionable information on where a given class of ship can navigate safely and where icebreaker assistance is needed.
“When analysing a 3D point cloud model including the ice’s reflectance, this not only allows us to take measurements of the ice surface’s geometry such as ridges, cracks and the general surface of the lead, it also helps the ship’s crew to gain a good understanding of the surface material – be it water, snow, dry or wet ice. All these surface types show distinct differences in reflectance,” Klusak adds.
“That’s important, because when the icebreaker’s just sitting there, it’s costing around €900 per hour, but when it’s assisting a ship, it costs around €2000 per hour – or roughly €250 per nautical mile – so surveying with Lidar this way gives them a really good idea of when to move out and when to stay put, saving thousands of euros per hour.”
“We use mostly readily available software for our post-processing, but there’s a fair amount of scripting involved with our analyses. We have a couple of data scientists who are very skilled in Python, and we were originally founded as a GIS data analytics company, so we’re familiar with that. But all our original software goes into our r&d department, and is focused on the control and stabilisation of our UAS – it’s the only system on the market where the drone itself is the gimbal.”
The gas-hybrid Orthodrone UAS has an MTOW of 25 kg, with about 20 kg in the main body (including payloads) and the other 5 kg in its two arms and the connecting ‘yoke’. This set-up, which is the core of Orthodrone’s hardware IP, will allow the system to be fully stabilised on 2.5 axes during its multi-hour missions.
Mine management
Progress monitoring is critical for mining project managers to be able to show executives and investors where targets on resource exploration or extraction are being met, and to address where shortfalls are occurring and how they will be fixed.
The mining sector is therefore one of the longest-established customers for commercial aerial survey systems, and the Quantum Systems Trinity F90+ UAV in particular is being widely adopted by mining companies for 2D and 3D photogrammetry and mapping.
“The Trinity’s design is inherently suited for mining work, as it is able to take off and land vertically near rock faces inside mines and quarries like a multi-rotor but then fly for long distances and cover very large areas in fixed-wing mode,” says Robert Leake, Quantum Systems’ EMEA regional manager.

(Courtesy of Quantum Systems)
“Using the data we can capture with the Trinity F90+, we can survey mines using either ground control points or post-processed trajectories and geotagged imagery, giving highly accurate georeferencing, depending on the application. Either way though, the integrated PPK capability has proven crucial for mining progress analysis, as accuracy is so key to overlaying maps of mines to see where changes in their geography have occurred between surveys.”
He adds that mining is an extremely safety-conscious market, and numerous aspects of the F90+’s engineering are geared towards this. For instance, a 7 km telemetry link enables its operators to stay well away from the mine and its associated hazards at all times. The F90+’s speed – 33 knots at cruise – and its 90-minute maximum flight time also help provide rapid data capture while the mine is operating, meaning that work schedules onsite are not hampered by the surveys.
The F90+ has a 5 kg MTOW and can cover up to 100 km of distance or 700 ha of terrain per flight. It has a 2.394 m wingspan, an operating ceiling of 4500 m, and can tolerate winds of up to 12 m/s during cruise.
While it is agnostic regarding photogrammetry software, compatible payloads for mine (and other geospatial) mapping include Sony’s 20.1 MP UMC-R10C and 42.4 MP RX1 RII cameras, the Qube 240 geomatics Lidar (which integrates an Applanix APX15 INS for enhanced accuracy of captured data) and several hyperspectral camera systems from MicaSense.
“The RX1 RII is probably the more popular of the two cameras, as it produces higher quality RGB photos for really accurate photogrammetry,” Leake notes. “We also have a new oblique sensor for the F90+, for applications such as open-pit mining where you have very steep pit walls. The oblique payload helps to get accurate, high-resolution imagery of those walls and the other surfaces around it for 3D model analysis.”
Oblique mapping
Oblique cameras are a relatively new type of payload in the UAV industry compared with, say, EO/IR gimbals and hyperspectral cameras, but the rapid growth in demand from the geospatial sector has spurred a similarly quick spread of this sensor package across the uncrewed world.
An oblique payload typically consists of a small number of nadir-pointed cameras and a higher number of obliquely pointed (but also downward-facing) cameras. This configuration enables the photogrammetry and hence 3D modelling of concave geographical features such as mines, river valleys, stadia and craters.

Such is the popularity of this capability across various geospatial markets that CHCNAV has introduced the HC-D2, a five-lens oblique camera, as a payload for 3D mapping to go with its P330 Pro.
“The P330 Pro is a VTOL-transitioning UAV capable of taking off or hovering for surveys in narrow spaces,” says Francois Martin, vice-general manager at CHCNAV. “Its endurance is about 2.5 hours, making it suitable for large-scale mapping projects, and it’s fully electric, with a 27,000 mAh lithium-polymer battery weighing 5.7 kg that can be fully recharged in just under 100 minutes.”
The UAV has a 14 kg MTOW, a 2.53 m wingspan, and a length of 1.21 m from nose to tail. It features four upward-facing electric motors mounted on booms that extend from its wings, and a fifth electric motor installed at the rear in a pusher configuration.
The HC-D2 weighs 960 g (fitting comfortably within the P330’s 2 kg payload capacity) and its cameras are configured with four oblique-pointed lenses (each tilted to 45º and with a 35 mm focal length) surrounding one centrally mounted nadir-pointing lens with a 25 mm focal length.
Each camera captures images at 24.3 MP resolution with a 0.8-second maximum exposure interval, and two integrated 640 Gbyte storage drives for carrying image data.
BVLOS mapping
Designing uncrewed systems around all-electric powertrains is useful to operators in the geospatial world, not only from a sustainability perspective but because battery-electric configurations are inherently simpler to maintain than IC engine-powered alternatives.

(Courtesy of Beagle Systems)
However, as the wider world recognises the importance of using UAVs for mapping and inspecting nearby as well as distant geographical assets, the ability of battery-electric UAVs to perform BVLOS missions given their limited flight endurances is being called into question.
German company Beagle Systems has therefore developed its Beagle M UAV and ancillary equipment with the aim of enabling reliable, routine, uncrewed all-electric BVLOS survey operations. The company’s founders identified markets where UAS capabilities are lacking, determining that heavy industrial survey capacities were at the fore.
“Most companies seeking geospatial data just want the data, not a drone or a fleet of them that they have to manage, and for organisations managing really large infrastructure assets like rail networks, solar farms and powerline grids, there’s not really a commercially established service model to help them,” says Oliver Lichtenstein, co-founder of Beagle Systems.
With an eye towards creating such a model, Beagle embarked on two courses of development. One was to obtain all the necessary regulatory approvals for flying in the strictly regulated airspaces that tend to be above such wide-area infrastructures.
“That’s key to being able to fly to practically any place in the EU to provide data,” Lichtenstein adds.
“Then we started designing and building a UAV which would conform with all the requirements of the drafts for EU drone regulations. I took part in the discussions with the German board for unmanned aviation, so we had direct insights into what government ministers wanted in terms of components and design qualities.
“We saw from those discussions that building and selling UAVs won’t work for some key industries, because for regulatory approvals the UAS operator will need to be able to submit numerous technical insights that the manufacturer won’t always want to give away, such as proprietary software or mechanical details. But if we build it ourselves, we can answer every question about why it’s safe to fly.”
As a result, Beagle is Germany’s only regular long-range UAV operator. Its flights include surveys for Westenergie, a subsidiary of E.ON that operates much of western Germany’s power grid. Missions include routine high-resolution surveys of power pylons, and on-demand flights using an API developed in-house for interfacing with Westenergie’s warning system.

That enables the company to see when and where a fault such as a short-circuit has occurred, so that a Beagle M can take off within 60 seconds of the associated alarm and fly with an automatically generated flight plan to inspect the area. The UAV has a 2.5 m wingspan with an inverted-vee tail, four fixed VTOL motors, a 3 kg payload capacity, a flight endurance of up to 120 minutes and a maximum airspeed of 180 kph.
“Thanks to our API, the UAV autonomously proceeds on demand to the airspace over the fault, uses our proprietary algorithm for automatic gimbal tracking of power lines or other structures to capture high-resolution photos of them while flying past at 100-150 kph, before transmitting medium-resolution images immediately over cellular networks. After landing, it downloads all the high-resolution data to allow deeper insights by the asset’s owner,” Lichtenstein says.
“Safety insights are critical for knowing the scale of repairs needed, so heavy industry customers need a lot of data, and quickly, regardless of where in Europe they and their assets are. Our pilot sits in Hamburg at a virtual cockpit, so if anything happens they can take over manually via a cellular data link.”
In order to reach any destination without the range limitations of electric flight, the Beagle M launches from and lands at hangars near the survey sites. These are charging container stations that house the UAVs and replenish their batteries during downtime.
They can also fly from one station to another, enabling them to ‘hop’ nationwide, all the way back to the Hamburg offices if the company’s technicians want to perform MRO duties.
Each hangar can fully recharge a Beagle M in just under 2 hours. It flies to the nearest one using GNSS guidance, lands on a visual marker on the hangar’s platform using a downward-facing camera, is pushed into place by linear rails inside the charging station, then spring-loaded contacts extend to touch the landing gear, through which current passes into its batteries. It then stays there, covered by the hangar’s shutter doors until its next flight.
Bathymetry
As well as geospatial data being critical for maintaining and tracking land-based assets, bathymetric surveys are key to capturing information on important littoral assets such as canals, reservoirs and major rivers.

(Courtesy of Riegl)
Numerous sensors and uncrewed systems are available for such mapping. For instance, Riegl’s new VQ-840-GL Lidar (the ‘L’ signifying that it is lighter than the VQ-840-G) can be integrated on heavy-lift UAVs such as the company’s RiCopter-M.
“The RiCopter-M has an MTOW of 40 kg and a payload capacity of 15 kg, with up to 15 minutes of flight time while carrying its payload limit,” says My-Linh Truong, division manager at Riegl USA. “It is a fully electric X-8 coaxial octocopter measuring 1920 mm across and has a maximum cruising speed of 30 kph.
“By having the same laser performance and water penetration as the VQ-840-G but in a lighter housing, with more than 2 kg shaved off, the GL variant weighs just under 10 kg for longer endurance topo-bathymetric missions.
“By ‘topo-bathymetry’, we mean it can be used for topographic as well as bathymetric mapping, so it’s good for surveys stretching from the terrain around water bodies and going down into the water itself. Its green-laser channel penetrates into the water body at up to 2.5 potentially secchi depths [a unit measurement of water clarity].”
“You could of course use sonar, but if you incorrectly assume a certain water shallowness you risk hitting something like a rock and damaging or losing that expensive payload, or even the vehicle itself.”

(Courtesy of Topodrone)
The VQ-840-GL is optimised for use in river flow studies, ecological surveys, fishery management and other environmental surveys.
Notably, UAVs designed and equipped for bathymetry can provide the opportunity to collect topographic, bathymetric and water surface-level data simultaneously. That can be vital for organisations looking to make digital twins of assets that extend above as well as below the water, such as harbours, oil rigs and wind farms.
3D sonar-based modelling is highly valuable to such groups, but including sonar data in topo-bathymetric surveys can be challenging, as any UAV equipped with a sonar would have to dip it into the water to use it correctly, and hence risk crashing.
To avoid this issue and enable straightforward sonar mapping for geospatial customers, Switzerland-based Topodrone A has developed the Aquamapper, a kind of towfish that is pulled through the water by an UAV.

It weighs 2.5 kg, and hangs beneath the end-user’s UAV platform by a tether. Inside is a single-beam echo sounder that pulses at 450 kHz, operating at an immersion depth of 0.2-0.4 m.
“Deploying and recovering USVs and UUVs can be rendered hazardous by features like rocky beaches or wildlife, but with our system a UAV and Aquamapper can fly to lakes, reservoirs, and coasts from a safe launch spot some distance away,” says Mayksim Baklykov, Topodrone’s CEO.
“It can measure 100 m down into the water, and work at speeds of up to 12 kph through it. We plan to unveil different Aquamappers in the future too, which will integrate different kinds of echo sounders, such as dual-beam and multi-beam systems.”
A GNSS-INS with GPS, GLONASS, Galileo and BeiDou support is integrated, as is PPK compatibility for enhanced accuracy of georeferencing.
One notable use case so far was by Graphein Topo in Romania, which conducted 14 flights with a DJI Matrice 300 integrating the Aquamapper and Topodrone’s Lidar Ultra payload. Over these flights it carried out laser scans of forest terrain about 32 km long by 400 m wide, as well as performing bathymetric surveys of six river crossing areas.
Summary
Geospatial surveys are now performed autonomously over a wide variety of industries, and depend on a great range of technologies (for more vehicles and technologies for geospatial missions, see our Intergeo 2022 report, page 66).
It is worth noting that uncrewed aircraft and watercraft, as well as ground vehicles in some cases, have eclipsed not only crewed vehicles in geospatial photography and mapping but also satellite imaging systems.
While the latter was once a prized tool of choice for mapping the Earth, the former’s closer proximity to areas of geospatial interest – not to mention the advances in their sensor technologies – enable them to create sub-millimetre accurate 3D models with far higher detail.
However, given the much wider fields of view that satellites and HALE pseudo-satellite UAVs can achieve compared with autonomous vehicles operating closer to the Earth, further advances in camera and Lidar technologies could one day enable them to carry out persistent high-resolution mapping of thousands of square kilometres per vehicle per day. The future of geospatial mapping might therefore include a return of satellite systems.
UPCOMING EVENTS








