







BushRanger UAV

(All images: The Eye Above, except where stated otherwise)
Eco-warrior
In designing uncrewed aircraft for conservation work, South African engineers are pioneering drone technology to performance highs and cost lows unlike anywhere else in the world. Rory Jackson investigates
All around the world, rangers responsible for protecting vulnerable wildlife and ecosystems are being murdered by those who profit from poaching, with one charity estimating that as many as 150 rangers annually are killed in the line of duty.
The casualties are especially pronounced throughout the nations of Africa, with at least 633 rangers counted as killed protecting animals and habitat between 2011 and 2023, including one striking incident of an anti-poaching helicopter mission being shot down in 2016.
This information may be shocking to those of us who spend more time preoccupied with wars between governments, but in regions such as southern Africa and southeast Asia where poaching is most rife, the fight between rangers and poachers is justifiably seen as open warfare.
Drones stand to revolutionise rangers’ abilities to stop poachers and give endangered species a fighting chance. As Robert Miller, founder of South African conservation non-profit The Eye Above (TEA) and CEO of New Zealand-based UAV company Telluraves Aerospace tells us: “An area that takes personnel like rangers 10–15 days to patrol on foot, a drone can map in about 65 seconds, plus provide HD and thermal photography for identifying humans, vehicles and animals.”
Miller was first introduced to drones as a solution around 2017, when a friend living in a reserve within South Africa’s Greater Kruger National Park alerted him to their potential for monitoring and even stopping the rampant rhinoceros poaching happening around the area.
“Sadly, he passed away before ever seeing his vision come to fruition but, fortuitously, another friend’s parents happened to be the wardens at the same reserve. After spending some time with them, I saw first-hand what they were up against, and it was genuinely life-changing,” Miller recounts.
“There is a war going on, and the poachers are winning because on top of rangers being killed or increasingly debilitated from PTSD, these parks and reserves are so big that rangers can’t ever patrol all of it at once. But, as said, drones can.”
After six months of trialling COTS drones, however, no progress was made other than realising that drones (as of 2017) were simply not engineered for conservation work. Miller and his team stepped back to analyse what a UAV needed to succeed in anti-poaching (his background in IT systems engineering henceforth coming to the fore).
“First, we looked for some kind of blueprint for integrating drones into conservation – but there was nothing,” he muses. “Absolutely no guidelines on how organisations like TEA should engage with rangers, air traffic control, civil aviation authorities or our police teams specialising in ecological protection. Because there hadn’t been a drone anywhere in the world that could be used to formulate such guidelines around.”
Looking deeper, TEA determined that a wildlife protection and anti-poaching drone would need very long flight endurance, and a very versatile payload capacity both in gravimetric and volumetric terms. One may note the potential engineering conflict here: the former mandates a tightly optimised propulsion-to-weight ratio, but the other requires deoptimising power-to-weight by dedicating extra mass, connectors, mounting components and non-propulsive power to a wider variety of payloads both big and small.
“We also needed the UAV to be small-ish, extremely quiet and VTOL-capable because if it’s working in the bush then there are no runways available, and it’s got to be capable of working in confined spaces, including take-off, landing and low-altitude flight or hover, amid very adverse and dynamic weather, along with the potential for wildlife or poachers to attack it from any angle upon noticing it,” Miller continues.
“You quickly realise that drones built in Europe, America and China aren’t built for our conditions. For instance, we can’t use much carbon fibre, as we operate hundreds of kilometres from civilisation, and so we need field-repairability. We can’t use foam-cut bodies or wings either, as they get broken apart in the air by our high winds, or picked clean on the ground by our local ant species for their nests. Leave a foam drone landed overnight, and its structure will be gone the next morning.”
Miller and his colleagues thus had no option but to design and build their own drone from a blank sheet, despite the lack of big investors or start-up capital ever available to the non-profit space. Hence, the subsequent founding of Telluraves Aerospace to commercially develop, license and sell the ensuing technology (with TEA operating it in a non-profit capacity, and seamlessly yielding data and feedback for Telluraves), with an eye towards eventually recovering the considerable personal costs (around $1 million collectively) that Miller and his colleagues have borne since 2017.
In pursuit of a flexible yet optimised, high-performance yet field-repairable uncrewed aircraft, Miller and his team have created BushRanger, a fixed-wing drone featuring a 15 kg MTOW and a 5 kg payload capacity, within a 2.2 m wingspan and 1.8 m fuselage length. An unusual combination of frontal, vertically-disposed fixed-lift motors with tail-mounted tiltrotors (which point forwards in a tractor arrangement for cruise) enable its VTOL, transitioning and 75 kph forward flight, all under battery power.
TEA and Telluraves claim BushRanger (to their knowledge as of writing) as the largest additively-manufactured VTOL-transitioning aircraft in the world. “And we know first-hand why: there are plenty of 1 m wingspan printed drones, but when you get to 2 m wingspans with 15 kg of mass, you’re pushing 3D printed material and technology way beyond where they’ve gone before,” Miller explains.
“As dangerous as that might sound, it’s necessary. Drones may have been adopted very widely and quickly for killing people, but they just haven’t been evolving for conservation. But military personnel at last year’s Xponential lauded BushRanger as a ‘medium-range reconnaissance aircraft’, marking it as potentially a $30,000 aircraft competing head-to-head in capabilities with UAVs priced at $500,000 to $1 million – but with a larger payload capacity and fewer restrictions than some of the latter group.
“Much of the West still operates on the paradigm that bigger is always better: bigger prices, bigger budgets, bigger drones and robots. But Ukraine has proven heavily that that’s not true in war, and we’re getting huge interest on the civilian side from ecological groups around the world who feel the same way, thanks to BushRanger, and the different facets and choices we’ve made across its design.”
The road to AM
BushRanger, as it exists today, is a conservation-focused derivation of a UAV by Telluraves called Vantis, although much development work and many resources have been shared between the two, with continuous evolution of the design since the late 2018s. Although an IT systems engineer by trade, Miller undertook several aerodynamics courses after 2017, to the point of leading the UAV’s aero engineering by the early 2020s.

“We were also very lucky for the contributions of aerodynamicist Dr Becker Van Niekerk, who worked early on the wings, taught me a great deal, and debated lengthily with me over the wing, tailplane and motor configuration,” Miller muses.
“Your standard VTOL-transitioning drone has a ‘4+1’ fixed arrangement of four lift motors and one rear pusher motor. They have issues. For one, what happens behind the wing is as important as what’s happening in front, on top and underneath the wing.
“So, those props that sit behind the wing and stop turning after you’ve transitioned into forward flight can actually cause huge turbulence. It seems like a free ride but it’s absolutely not. They’re getting in the way of efficiency, stability, safety and quiet for your flight.
“And then, the pusher prop at the back is sitting right in the dirty airflow from the body and tail. That makes turbulence, which generates extra noise at the propeller – it’s not stealthy, it’s loud! So, we knew from day one for the sake of flight stability and silence that we had to get all of BushRanger’s rearward props up and out of the dirty air, which has been an engineering challenge all by itself.”
Further helping R&D here was SolidWorks, which joined as a pro bono development partner early on, in a surprise to TEA’s preconceived notions of large companies and their attitudes towards non-profit work (Miller notes that SolidWorks has never expressed any interest in profiting from or charging for its work with TEA or Telluraves, and has given ample direct support to ensure that the aircraft would fly and function as needed).
The V-tail design, down to the vee angle, tiltrotor placements and horizontal stabilisers, was thus designed in 2019 – although with a bottom boom made of a tubular structure typical of many drones and gliders. A foam prototype was cut and thrown from a cliff to test its aero performance – and it exceeded all expectations.
The team then studied how best to build it, and determined that its initial plans to cut foam moulds for aluminium and glass fibre were untenable owing to a lack of specialist CNC workshops near their operating theatres. In fact, so huge was the necessary investment in such manufacturing for a sustainable drone production ecosystem to support South Africa’s reserves and national parks (let alone exporting BushRangers to other eco-warriors worldwide), that additive printers quickly became the more cost-feasible option.
“We looked into every additive manufacturing [AM] technology out there, starting with HP, before moving on to all the providers we could for selective laser sintering [SLS], and then stereolithography [SLA], before building a huge fused deposition modelling [FDM] printer ourselves, including a high-heat chamber,” Miller explains.
“Our initial hovering flights since 2019 were done with parts from that printer, but they were really only good enough for single-flight aircraft – not something viable to fly commercially again and again.”
In 2023, however, HP Additive Manufacturing reached back out to TEA, explaining that it had a new AM printer: the multi jet fusion (MJF) 5600. Although hesitant at yet another AM sales pitch (most of which had overpromised and underdelivered), Miller and his team decided to buy in – initially for a notable price.
“But HP quickly realised that this project was significant and valuable enough from a conservation aspect – and in real-world data they’d gain, if nothing else – that they waived initial development costs and partnered with us to actually produce the first usable airframe. It was a huge step-up,” Miller says.
Indeed, the collaboration has, as indicated, combined technologies and subsystems in a way that is unearthing heretofore unknown behaviours and interactions. For instance, BushRanger’s primary structural material, PA12 Nylon, is highly durable, especially compared with printed ABS that cracks when used in high-performance drones whereas PA12 flexes to avoid actual damage.
“However, UAV autopilots were never designed to handle a motor mount bending and then snapping back like an elastic band,” Miller observes.
“They’re programmed to push something until the material either stops moving or breaks. So, we’re working with Ardupilot directly because the physical design for this version of BushRanger is now fully optimised and set in stone, and all that’s left are software challenges like this one regarding the intelligence needed to capture the characteristics of the material.
“And in the meantime, we’ve had to work around certain limitations of PA12, with the V-tail for instance withstanding a huge amount of force in operation. Carbon fibre would be more structurally sound there, but being able to field-repair the tail, wings and body by simply replacing damaged parts is a game-changer for remote work like anti-poaching.”
Aero and interactions
In optimising the tail for aerodynamics, Solidworks simulation indicated that the tubular part needed to move higher, from the bottom to the top of the fuselage. Soon thereafter, it also stopped being a tube.
“Many aircraft are cylindrical, but that’s not totally to do with aerodynamics: it’s often because it’s easier to pressurise a cylinder and a cylinder generally has a smaller wetted area. And we found during our flight trials that BushRanger’s printed tail was too flexible at the round section,” Miller notes.
Telluraves, however (in its capacity as an independent developer of technologies, with plans to commercialise them once TEA was fully running), brought forwards its ‘Shark’ airframe, so-called because of the biomimicry of the curvature of a shark inherent to its design, including a more square-like profile and slightly thicker fuselage and tail.
Through its R&D, Telluraves had confirmed that sharks’ bodies function as hydrodynamically efficient lifting fuselages, potentially generating immense lift. Hence, after adopting the shark-style fuselage, BushRanger not only gained considerable rigidity at the tail but also increased its lifting capability by 2.5 kg (without changing any other subsystems).

Also helping here is the positioning of the wing, its root sitting mid-height on the fuselage. Positioning the wing here keeps it low enough for its wake to pass beneath the tail tiltrotors, keeping airflow smooth and predictable instead of flowing dirty air onto them, while also enabling a straight, lightweight main spar to run through the fuselage.
“As to why there aren’t so many lifting drone fuselages, and why there are so many cylindrical aircraft – despite birds not being cylindrical – I imagine part of it comes down to everyone using the same CFD software, and perhaps letting it dictate too much of their aerostructure designs,” Miller muses.
“CFD softwares are subjective based on their algorithms, and so big companies in the same industry who all use, say, Siemens, will often end up producing very similarly-shaped vehicles, as will those who rely too much on SolidWorks, or Simulia, over original thinking and real-world experimentation.
“But they just don’t have the time for that because their engineers are pushed to the limit with tight schedules and budgets to meet. While funding’s never been plentiful for us, we agreed from the start that we’d have no budget and no time limit – we needed a drone that was truly fit for purpose and we knew it was going to have to take as long as it takes. There are no shareholders pressing us for results ‘Now, now, now’. So, we’ve never had to compromise in really optimising this aircraft and making every hour and every penny count.”

The first HP-printed parts with the present-day shark-like fuselage arrived at TEA’s offices in late 2024, after which the team determined that more powerful motors were needed. After roughly 12 months of system-wide optimisations, it acquired its first batch of Vertiq electric motors, Miller expressing great satisfaction with their power and sophistication.
“They were so powerful in fact that we started encountering the problem of PA12’s elasticity, which we hadn’t experienced with the earlier, weaker motors – but we needed the power, no question,” Miller says. “So, we kept them, focused on fixing the issue, and BushRanger today outputs 28 kg of lifting force with full hovering stability.”
The charging elephant problem
By mounting the tiltrotors on the V-tail’s front, BushRanger effectively becomes a vectored-thrust tiltrotor aircraft, giving it immense manoeuvrability in hover.
That design aspect also means its VTOL-transition processes work differently than other transitioning aircraft we have featured. First, after vertical take-off, the rear motors do tilt forwards slightly and gradually – but the large front rotors do most of the actual lifting work. They sit close to the CoG, handle 70% of the lifting load, and are optimised for vertical flight via low disc loading and commutation behaviour optimised for a smooth, efficient hover.

“Moreover, when it comes to designing individual motors and propellers, you can either lift efficiently or fly forwards efficiently – you cannot easily do both. So, the front motors are really optimised to get mass off the ground, while the rear do an efficient cruise in forward propulsion, and give precise control, balance and a tiny little boost to lift during hover, VTOL or transitioning,” Miller adds.
“As we start flying forwards, it’s very easy to tilt the rear motors because BushRanger barely loses any vertical thrust by tilting them – and at some stage, they’re fully forward-tilted. Then, we just spin the front motors down – we don’t actually have to physically stop to transition, as many other drones do.”
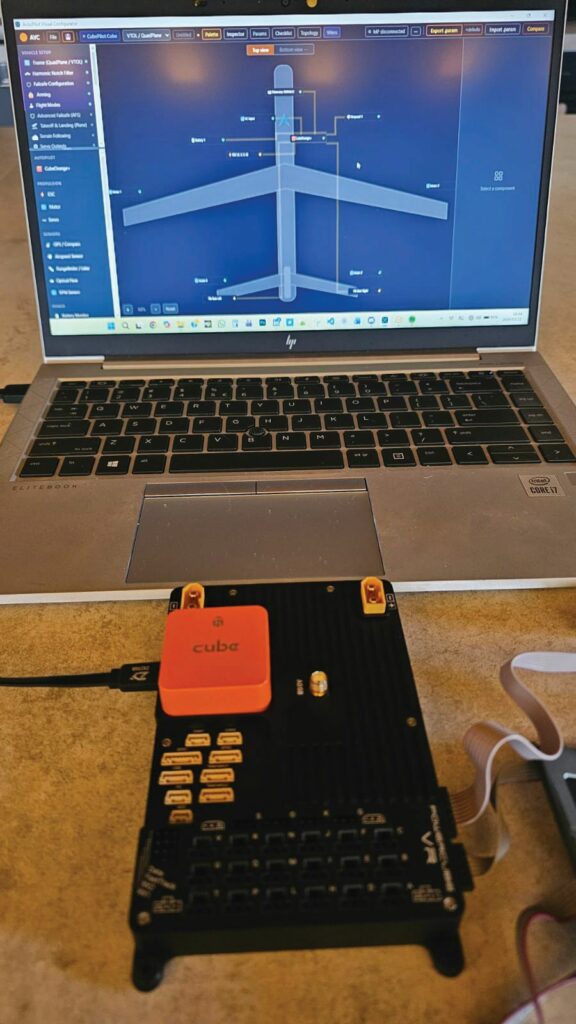
However, few autopilots are designed to handle that type of non-discrete transition, also seen in previous cover stories such as those on the V-Bat (Issue 16) or Pterodynamics Transwing (Issue 41). TEA, however, is able to program its Cube Orange+ flight controller to transition at the stage when BushRanger is no longer battling to fly level. That is, when airspeed and altitude data indicate that both have reached – and are being maintained at – a contextually-ideal threshold.
For additional airflow smoothing, the front rotors tilt slightly downward (consistent with the wing’s 7° angle of attack), rather than sitting flat as in traditional quadrotors. This ensures that they do not pull air away from the wing’s surfaces or interfere with airflow, lift or drag during transitioning, and thus problems of reverse thrust and drag spikes (sometimes seen in standard VTOL architectures) are prevented.
But, conversely, at ground level, when BushRanger sits at rest, its landing struts are designed such that it sits tail-down with the front rotors being angled slightly upward. When powering-up for take-off, the tail lifts first, the front legs stay grounded briefly, remaining idle until the fuselage levels out, thereby affording the UAV strong yaw authority early in the lift-off process, meaning it can stabilise itself fully before all mass leaves the ground.
Beyond VTOL-transition stability, transportability has been a critical target for BushRanger’s structural design. As Miller puts it: “We needed an aircraft that folds up as small as possible, is single person-deployable, quickly – and can still carry a wide range of different payloads.
“People assume from this that taking apart an aircraft, wings and all, and stuffing everything tight into a Pelican crate is the solution. When you have an elephant charging you in the bush, you do not have the luxury of time. You need to pick up this aircraft and either set it flight-ready or throw it in the back of a truck as quickly as possible.”
Placing the tiltrotors at the end of a long tail has meant designing significant structural reinforcement along its length both for stable operation and for surviving minor throwing impacts, but a first step in easing transportability has been to print clamps in-place where the tail and fuselage meet such that the tail slides in, connects and locks into position.
Similarly, the front wings have folding hinges. “We don’t remove the wings entirely, as that’s where things start going wrong in the field. End users can ask for that but, as of now, BushRanger folds upwards into a 1.2 x 0.9 m package, which fits easily in the back of a pickup truck,” Miller explains.
“One person can take it and deploy it in the field, as well as recovering and packing it up, which is actually quite unusual for an aircraft of this size but very advantageous for rangers.”
The aircraft also features a longer nose than is typical, a design choice made early upon discovering that the batteries lack enough forward room to make way for a requested radar integration further back. Now, up to 70 Ah of 48 V battery packs can be installed, bringing endurance up to 7 h if needed.
“We can trade-off battery and payload weight, putting new payloads anywhere in the fuselage we want, by just printing a new fuselage whenever we want,” Miller adds.
“Going with a thin, tubular fuselage would’ve limited us to smaller packs and tiny, dense payloads – but the large, shark-like body relative to overall size gives BushRanger more internal mounting space and helps it better carry its own weight.
“And beyond just fitting in more batteries, we’ve had to think about literally every possibility we might encounter: Where should the batteries sit for safety optimisation? If we have two separate packs, how do we distribute them? Where should our gimbal go? Where should a synthetic aperture radar [SAR] go now that some are requesting SAR for aerial snare detection?
“When you see for the first time how much deadly snare length gets collected from a sweep of just one reserve, it’s horrific – so having that extra space from the fuselage design and being able to print fuselages with new mounts or bays ad hoc, are really game-changers for this industry.”

Multi jet fusion
Although MJF is TEA’s preferred AM technology today, its earlier focus in 2022 had been on FDM, including research into infills and AI to help print BushRanger into reality.
“But the problem with FDM is that you’re printing unsupported material – you can extrude supports into your design, but you can wind up with hundreds of them and they take time,” Miller says.
“In any case, FDM often needs clever geometries to print structures that work, but those aren’t necessarily the optimal operating structures. Instead, we spent about three years designing a self-reinforcing cell structure, which would print predictably and controllably based on our simulations, whether in FDM, SLS, SLA or MJF.”
This sped up TEA’s iteration loops such that it could start testing airframes the moment it switched to HP’s MJF. Conversely, its FDM-printed airframes could be heard cracking every time the transport vehicles hit a bump en route to a test site. That said, some printing is still performed in-house using parts from companies such as Wham Bam Systems, who have provided critical componentry to TEA’s FDM printer since the conservation non-profit’s early days.
“There are lots of really good FDM printers out there, but they’ll never get a Z-layer to adhere properly, plain and simple – no matter how they try to work around it, there’s going to be a weakness somewhere, and at some stage that weakness will become a mechanical failure,” Miller says.
MJF is a technology owned by HP and it functions similarly to SLS, using a powder bed of additives that are fused together (through using an IR energy source and a fusing agent, rather than a laser as in SLS). MJF and SLS are generally regarded as producing finished components of similarly-high quality and resolution, although MJF prints notably faster than SLS – by an order
of magnitude in some estimates – and thus, it may address changing or modular mission needs much quicker without sacrificing part quality.
Speed of assembly is also achieved by TEA’s design, Miller estimating that BushRanger can be snapped together in 10 minutes (assuming no swapping out of electronics or packs), with the latest versions adding reinforcements at the snap-fit connectors and similar small functional optimisations.

“This is the beauty of AM: every print of the UAV brings an improvement – it’s constant evolution. If we go back to conventional manufacturing, we’d need to re-tool every time we wanted to update something, and that’s a great deal of time and money,” he says.
Future in print
Per discussions with HP, next steps may even include printing the UAV’s power and data connectors as part of the structure, with pins that clip into them, instead of purchasing actual connectors, as a potential workaround for combined power-and-signal connectors not yet coming in surface-mount versions or sometimes lacking aerospace-grade ruggedness.
“Plus, when you run cables through a wing, you often lack the space to run the connector through the wing, once it’s on the cable – you end up having to try and solder afterwards,” Miller adds.
“But by using some bare-bones wires that come with pins on both ends, we just snap into printed connector sockets on the drone and that’s effectively your connector, right there!”
Additionally, the aforementioned cell structure may enable use of a new composite manufacturing at the tail, which would embed and lock foam into the cells, preventing the delamination risk conventional epoxy-adhered structures suffer when stressed.
“That’ll afford us a 0.5 mm aerodynamic continuous surface skin – which HP has pushed to for us – with a very lightweight and strong foam inside, with minimal weight increase, and it’s almost unbreakable. You can stand on it and there’s no damage,” Miller explains. “It also gives a new level of rigidity we’ve not had with the PA12 so far.”
The company has also looked into topology optimisation – the computational design method by which one may reduce material use to solely where it is needed, thereby maximising parts’ structural efficiencies and performance-to-weight ratios (performance including tensile strength, rigidity, longevity or other parameters).
“But many in the industry don’t want to go there because if you come from a CAD background, AM topology optimisation is basically a foreign language, and CAD packages really don’t interface well with topology optimisation packages,” Miller says.
“Only one package I’ve found so far – nTopology – seems to work well. There’s still a massive, massive learning curve that we’re getting to grips with, but it really treats each part as a holistic component, which could mean we finally make the perfect PA12 tail.
“Most other packages focus too much on the internal structures. You’ll have seen how cars today use AM parts with beautiful geometries and they’re really lightweight – but afterwards, you still need to put a skin over it, which adds all your weight back on. You really have to optimise with the skin on – with all of it on – all as part of the structure.”
After each print or delivery thereof, TEA and Telluraves perform stress testing with extreme prejudice to gauge their limits, identify stress points and validate decisively if they will withstand bush operations.
While the flexing of PA12 has posed an issue at the tail, its high elasticity also contributes to extensive longevity per airframe, Miller estimating that each BushRanger should last two years operating in the bush between part replacements (whereas an ABS airframe would struggle to last more than a few such missions before breaking), although lifespan will vary greatly depending on the highly diverse conditions environmental organisations will work across.
“We recently tested some parts in the Antarctic and they survived – spectacularly, actually, considering the loading on them – and I imagine BushRanger would last a year there before fracturing. In any case, we’ll be looking to get an up-to-date airframe operating down there once we’re done with some more flights up here,” he notes.
In addition to being able to recycle or upcycle PA12 from parts reaching end-of-life fairly easily, Telluraves plans to continue upgrading the airframe with new AM technology – both printers and materials – as they come out, potentially updating parts as they must be replaced.
Power and control
In addition to lauding the contributions of its various avionics suppliers, TEA notes in particular that Vertiq provides not just NDAA-compliant electric motors, but also a very helpful integrated motor-ESC design.

“As UAVs get bigger, having your motor controller sit separately, either in the wing, the fuselage or down a rotor arm is becoming a problem because you’re running an extra wire,” Miller explains.
“People may say: ‘Oh, come now, it’s one extra wire’, but when you’re running wires 3 m long, it’s not uncommon to add an extra 300–400 g just by excess wires alone. So, the industry really needs more NDAA motors with ESCs built-in away from the fuselage.”
TEA preferentially uses Vertiq’s 60-08 G2 and 81-08 G2 modules, which are optimised for 12S power and sized at a diameter of 67.2 and 87.1 mm, respectively. At 60 A and 50.4 V, Miller again posits that they may be overpowered for BushRanger’s needs, but their fine control and various performance features bring significant advantages and prevent notable issues.
“Granted, there was the issue of the motor power imparting too much force on the Nylon tail and wings because subtlety matters. If your autopilot can’t apply the throttle gradually enough, you can imagine what happens,” Miller says.
“One thing starts moving, which gets something else moving and before you know it, everything’s moving – so the trick is to prevent anything moving in the first place. We spent a lot of time tuning away at the airframe before finally sussing that the far better fix was just a comms and firmware tweak to the ESC.”
To execute that, new ESC firmware has been provided by Vertiq. Additionally, a new carrier board from PowerBox Systems Industrial has been integrated, which cuts out several voltage regulators and similar components BushRanger had previously borne, thereby eliminating many points of failure and greatly reducing the wiring, meaning reduced weight and chances of signal losses along excess wire lengths. Put together, autopilot and motor performance have been greatly improved.
“Vertiq are very forward thinking, and as part of that their ESC can talk in many different protocols. Their CAN is especially good and provides much subtler control than, say, D-Shot; that’s part of the reason why we’re now switching to CAN bus across the whole aircraft,” he adds.
Four CAN-based Hitec servos are planned – with PWM used (as of writing), as is conventional for UAVs even in later development stages. Two waterproof actuators run at the tiltrotors, with micro-sized units for the V-tail’s two ruddervators, their selection and technical support closely being guided by Hitec (Miller names Hitec’s Shawn Spiker directly as a major contributor here).
“We also have an electronics consultant hailing from automotive. He worked a lot with CAN bus and was horrified at DroneCAN. In his words, it’s not how CAN bus was designed to be used, at all,” Miller muses, echoing a sentiment that others have also told us.
“As he says, CAN was meant to daisy chain end-to-end with the resistor, not become this bizarre star topology that’s spawned off and everyone is using. And DroneCAN is a 5 V protocol, in principle, but we use 8 V servos – while DroneCAN could support up to 30 V by specification, no-one’s supporting that yet.
“If I’m running 8.4 V servos with only four wires – which was the whole point of DroneCAN – but everything else is on 5 V, how can I run four wires? But, in any case, CAN will bring huge advantages for our motors and servos over PWM, including much better throttle and angle resolution.”
In addition to potentially engineering some workarounds for that in-house, TEA also continues to write its own transition motor and servo algorithms because Ardupilot only supports VTOL-transitioning with frontal tiltrotors (despite the severe dipping that having frontal tiltrotors can induce if synchronisation is even marginally imperfect at the hand-off point between lift and forward flight).
It is also looking into making its own battery packs and BMSs, having found cell suppliers in Japan and South Korea with superior energy density to Amprius’, and having meanwhile found a dearth of 12S, 48 V battery support across the drone industry.

“Battery tech is interesting. This group in the UK, About:Energy, does comprehensive and transparent testing of all battery cells it can find, and found a South Korean cell close to 550 Wh/kg, which doesn’t need the kind of cooling Amprius’ cells need. The problem there is that these cells have a lower recharge cycle, with a limit to 100 cycles,” Miller muses.
“But a lot of drones don’t even come back 100 times. And even though ours do, frankly, if I can get that kind of range and performance and have to take my battery out of service at 90 cycles, then I’m taking my battery out of service at 90 cycles and sucking up the cost because the benefit is so huge that it more than covers the expense.”
Avionics
While Here-type antennas, radios and GNSS from the Cubepilot ecosystem mark most of BushRanger’s avionics (with great thanks from Miller for Philip Rowse’s immense support for The Eye Above’s project), TEA also integrates a LightWare Lidar for a real-time obstacle avoidance capability atop the Here4 Pro’s navigation.
The Lidar points 45° downwards (despite Ardupilot not supporting such a configuration) to track both frontal terrain obstacles and height above the ground with a single device, a length of in-house code serving to triangulate for altitude data.
“Eventually, we’ll augment that with a long-distance spinning Lidar, for 360° situational awareness around the drone, which is important because when we’re hovering, ascending or descending, objects aren’t always going to come at us from the front,” Miller says.
“To do that with cameras, we’d need five or six of them, meaning a huge mass addition and little to no cost-savings, especially as we’d also need an AI computer fast enough to process six cameras. People might criticise that we can’t identify what’s heading at us without cameras and AI but we don’t need to know what it is – we just need to know it’s there, so it and the drone don’t collide!”
While civilian air traffic should not fly where BushRanger operates, TEA knows well that many GA pilots will still fly over the bush without clearance (simply, if nothing else, to the immense convenience of flying over driving, be it for business or pleasure). To potentially aid against air-to-air collisions, at least for compliant aircraft, a PingRX ADS-B receiver from uAvionix is also installed as standard.
“We’re also especially after an IP-rated spinning Lidar to endure all the dust and precipitation the bush can impart, but we do feel LightWare’s technology moves at a fantastic pace, and that they’re really setting the industry standard all around the world. So, we’d be delighted to keep working with them as a supplier,” Miller notes.

(Image: HP)
“Interestingly, Sony is also moving into Lidars, so there’s definite interest in Lidar technology, and we hope to see lots of advancement, diversity and power improvements in Lidar – without harming human eyes, of course – in the future.”
Ecosystems for ecosystems
On top of plans to optimise and supply BushRangers for other conservation groups worldwide, TEA is heavily dedicated to selectively expanding for its drone operations (and consulting others seeking to do so) with preferential hiring among those rural communities closest to the reserves that poachers threaten.
“This problem is bigger than just rhinos or pangolins. Entire ecosystems all over the world are under threat, and as nice as it is that other conservationists are getting in contact saying it’s as if we designed this drone for their work, the rural communities around those ecosystems have been pretty much forgotten by society,” Miller says.
“If we don’t find a way of making those communities part of the solution, then they’ll turn to being part of the problem to survive. It’s human nature. So, our blueprint includes training local communities as drone pilots and technicians, practically giving them ownership and stewardship over both aircraft and wildlife, and potentially turning them into technology centres that can grow, export specialists and funnel money back into sustaining such communities.”
The responsibility there will lie with Telluraves, TEA being more South Africa-focused. To the latter, fellow non-profit the Endangered Wildlife Trust (EWT) has worked closely to support development of TEA’s operating and integration blueprints, including lining up a plethora of suitable test sites.
“We’re discussing with EWT if they want to keep using the current BushRanger, with its rear tiltrotors, or switch to an upcoming 4+1 design Telluraves has concocted, in which we’ve used a bunch of lessons from BushRanger to potentially overcome all those turbulence issues I mentioned earlier,” Miller adds.
“But drones need to exist in an ecosystem for what we’re trying to accomplish. EWT has worked really hard with us to define BushRanger’s design and requirements, PowerBox is our newest supplier but we’re absolutely thrilled with their product and support, and we’re using 49 in screens from AOC to do CAD where we can visualise the whole airframe at once.
“On top of all that, Sony’s actually providing the ILX-LR1 cameras for the project as soon as we’re ready to receive them, and I have to say, Sony’s Starvis is one of the most under-utilised lowlight visible sensors out there. We were testing some machine vision cameras with Starvis sensors, and they can see in darkness equal to one star in colour. They’re plenty used in security or dashcam applications, but their night vision capability is astounding.”
Going forwards, TEA hopes to also secure high-end suppliers of propellers, and is speaking with Gambit in the US to choose a software interface for fleet or swarm coordination, having seen Ukrainian uncrewed systems’ recent triumphs over NATO’s uncrewed systems in battlefield exercises (owing to the former sharing a single, common operating system that all Ukrainian troops know how to use).
“With Telluraves looking as much to license others worldwide to print BushRangers from their local HP5600s as they are to build and export UAVs, we’re looking at coordinating UAV fleets and rangers on the ground and on water in a way that’s not dissimilar to a battlefield system, with vast mesh communications networks trading signals and live surveillance data,” Miller says.
“But we’ve no interest in keeping this market to ourselves. We’re hoping that once this blueprint for successfully using drones in conservation is published, others will come in with ideas of their own – hopefully, with a system that everyone can use to work together. There’ll be different kinds of uncrewed systems suited to different tasks along the conservation chain, from monitoring to interventions, and if we’re going to save the world’s ecosystems from further damage, we all need to be working together.”
Key specifications
BushRanger
Fixed-wing UAV
Battery-electric
Fixed frontal boom-mounted
VTOL-transitioning motors
Rear-mounted tiltrotors
Wingspan: 2 m
Payload capacity: 5 kg
Operating speed: 75 kph
Maximum endurance: 7 h
Some key suppliers
Additive manufacturing: HP Additive Manufacturing Solutions
Additive manufacturing accessories: Wham Bam Systems
CFD: SolidWorks
CFD: MECAD Systems –
SolidWorks South Africa
Flight controllers: Cubepilot
Additional avionics: Cubepilot
ADS-B receivers: uAvionix
Servos: Hitec
Electric motor drives: Vertiq
Power and signal distribution: PowerBox Systems Industrial
Lidars: LightWare
Gimbals: NextVision
Cameras: Sony
UPCOMING EVENTS



