







Improved traffic flow with vehicle platooning
(Image: Tsinghua University)
Researchers in China have used the rear lights of vehicles to communicate in a platoon, writes Nick Flaherty.
Vehicle platooning allows vehicles to travel in tightly coordinated groups to minimise aerodynamic drag, conserve fuel, alleviate road congestion and bolster safety through synchronised movements. By maintaining close following distances, platoons can achieve substantial reductions in air resistance. For instance, a vehicle trailing one predecessor at a speed of 80 kph and a distance of 25 m can experience up to 30% less drag, with even greater benefits extending to multiple followers.
Such formations also promise to dramatically expand road capacity, potentially doubling effective throughput in fully platooned scenarios, while synchronised acceleration and braking contribute to fewer collisions and smoother traffic flow.
However, this scenario requires robust vehicle-to-vehicle (V2V) communication with low latency to ensure real-time sharing of driving states between the lead vehicle and followers to maintain stability and responsiveness.
Conventional V2V technologies, including dedicated short-range communications, cellular vehicle-to-everything and traditional visible light communication (VLC), often depend on roadside units, which increases the cost and infrastructure requirements, while remaining vulnerable to cyberattacks such as denial-of-service or GPS spoofing.
In dense traffic, these radio-frequency systems suffer from interference, delays and channel leakage. VLC faces hurdles in achieving flicker-free, secure transmission and requires specialised photodetectors that perform poorly under direct sunlight because of scattering noise.
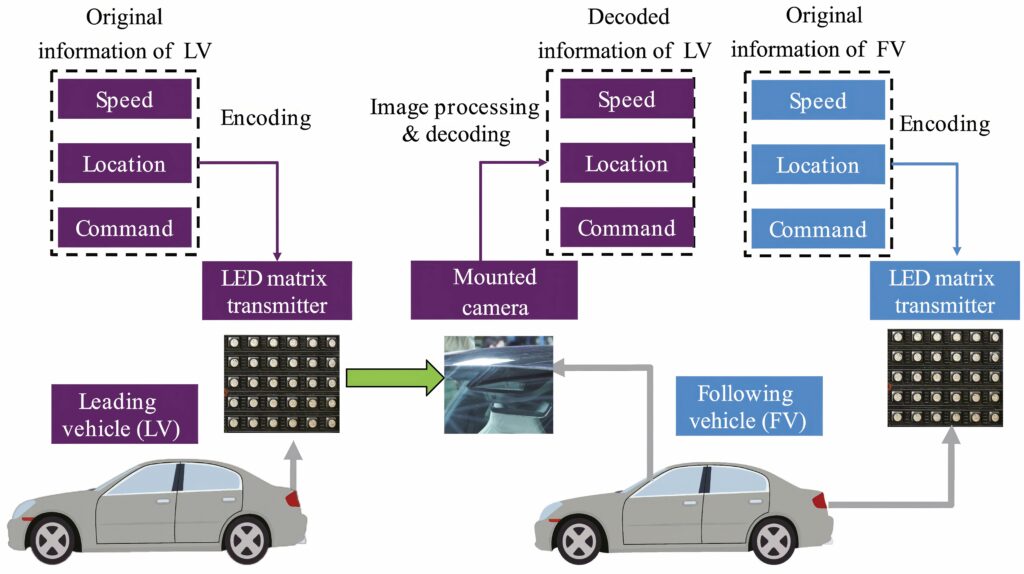
To address these limitations, researchers at Tsinghua University in Beijing have developed a vision-based approach that uses the lead vehicle’s rear lights as an LED matrix transmitter. This approach encodes data by selectively activating LED units within the matrix, with following vehicles capturing and decoding the signals using a standard monocular camera.
This transmits various parameters such as velocity, acceleration status, steering behaviour, unique vehicle ID, local time stamp, coordinates of longitude and latitude and distance from obstacles ahead.
By employing object detection algorithms, the system reliably extracts transmitted messages without any network dependency or additional hardware beyond existing vehicle components. This design not only avoids the need for roadside units or photodetectors but also exploits visible light’s inherent advantages: immunity to electromagnetic interference, no consumption of the radio spectrum and directional transmission.
The data are used in the control algorithm of the following vehicles, enabling them to track the path of the leading vehicle while also ensuring an appropriate separation distance is maintained between both vehicles.
Real-world experiments using robotic cars controlled by a Raspberry Pi single board computer as proxies for platoon vehicles validated the system’s performance. The LED matrix rear light enabled accurate, stable and timely data transmission even in complete network absence, demonstrating high reliability under varied conditions. These results highlight the method’s resilience when networks are unavailable and where traditional systems falter.
This system has the potential to accelerate the transition of conventional vehicles toward partial autonomy by enabling platooning functionality with minimal retrofitting. Future refinements might explore integration with higher-resolution cameras for extended range, adaptive encoding to counter environmental factors such as weather or lighting and expansion of the system to platoons with multiple vehicles. Combining this with emerging autonomous systems could further optimise platoon dynamics.
UPCOMING EVENTS



