







UUVs
(Image: Boxfish Robotics, photo by Zach Melnick, ROV pilot)
Swimmer’s build
Autonomous subsea systems are being built for all kinds of applications, with efficient development, modularity and cost-effectiveness being prioritised – as Rory Jackson discovers
Generally, makers of autonomous UUVs get to enjoy a rather different market entry route compared with that of manufacturers of uncrewed systems for aerial and terrestrial applications.
For example, drones must be built incredibly safe to replace or integrate alongside helicopters and aeroplanes in mixed airspace (let alone fly over populated areas), and ground vehicles must adhere to strict safety standards if slated for operations on roads or around pedestrians.
Autonomous UUVs, by their nature, operate quite far from human beings. And rather than replace driven road vehicles or piloted helicopters, they are generally taking the place of ROVs and divers.
These properties make them subject to little (if any) regulation, and often they come with the inherent provision that they will make life safer and easier, either for divers or ROV operators, by allowing human beings to stay further away from the dangers of ocean conditions or watery depths.
With little regulation and a wide array of use- and cost-cases to cater for, UUVs can arguably be engineered more flexibly than other varieties of uncrewed vehicle. Greater market demand has thus spurred the creation of many UUVs in more low-cost, software-defined and ROV-like ways than the industry-standard, high-cost automated AUV.
A selection of such examples follows here to illustrate that flexibility.
Environmental protection
On top of leading much of the world in establishing new protected habitats for marine wildlife, Australia and New Zealand are also major hotbeds for subsea autonomy innovation, and the former is increasingly supported via leveraging the latter.
Throughout this part of the world (and increasingly beyond it also), New Zealand-based Boxfish Robotics is a recognised name in enabling such UUV technologies, having been founded originally to produce ROVs with distinctly higher-quality imagers.
“Inspection-class ROVs have tended to use fairly basic cameras that produce low-quality imagery and, in many cases, this is still the case today. They also had slow response times, with noticeable latency back to the operator and limited manoeuvrability in how they were controlled. Boxfish’s founders really wanted to offer something more advanced,” recounts Vera Bronza, co-founder and manager at Boxfish Robotics.
Hence, its early ROV products came with 4K and soon thereafter 8K cameras, 6DoF manoeuvrability, and various hardware and software adaptations for minimising control response times. Their reputation for image quality soon saw Boxfish products being leveraged for underwater cinematography, particularly in nature and natural history documentaries by teams of scientists and filmmakers. One Boxfish customer in Canada, for instance, documented a huge mussel invasion in the Great Lakes, which emptied their waters of all clouds of plankton, thereby enabling filming of old shipwrecks, fields of mussel blooms and a shocking dearth of fish owing to them being forced to migrate for sustenance.
“Some fish and other marine creatures are so small that you genuinely need 8K resolution cameras to have any chance of seeing them – that’s not just important for documentary filmmakers, but also for invasive species monitoring like that in the Great Lakes, and Australia and New Zealand have some of the strictest laws and regulations when it comes to tracking and stopping ingress of foreign species into our shorelines,” Bronza notes.

(Image: Ocein AS)
“There have been multiple incidents globally where weather events or foreign vessel hulls have introduced species that impacted local biodiversity. Having tools that enable rapid response, tracking and effective mitigation is therefore vital for authorities.”
While its ROVs were also designed to be small, portable and modular systems – ideal for quick, application-specific responses to environmental concerns – the move to uncrewed underwater inspection was important to allow teams to operate much more efficiently and collect more precise data.
“Our ROVs were field-proven platforms, so we made some hardware modifications and added an autonomy software package to provide tetherless AUV versions of them, including some algorithms we’d trained to rely on acoustic- and vision-based navigation, more powerful computers for running those algorithms and others for data processing, and a few different sensors to empower that navigation including stereo cameras,” Bronza says.
The AUVs also allow for precise tracking, enabling overlapping images for photogrammetry to be collected even at very low altitudes in low-visibility environments.
Boxfish now produces two hovering AUVs: the first was the resident AUV, ARV-i, a 28 kg, 750 x 645 x 340 mm robot, and the 25 kg eponymous Boxfish AUV came later for non-resident applications, measuring slightly smaller overall at 730 x 435 x 351 mm. Both systems integrate 600 Wh battery packs for up to 10 hours of diving endurance between recharges, and are engineered for maximum depths of 600 m and environmental temperatures ranging from -10 to +40 C.

“We also added some other subsystems to enable tetherless operation; the ARV-i for instance comes with a wireless charging connector so it can inductively replenish its batteries at its residence station during downtime,” Bronza notes.
Aquaculture
Offshore fish farming is arguably the best means towards sustaining and replenishing the ocean’s naturally occurring fish stocks, but its vast floating net installations need diligent care against issues such as biofouling, damage and disease.
Monitoring for such issues – and, to some extent, mitigating or resolving them – could well be tackled by UUVs, although achieving fully autonomous and effective robotic systems inside fish farms presents a number of technical challenges. Norwegian company Ocein AS is among those negotiating this frontier of UUV capabilities, with their semi-autonomous StealthResident UUV.
The StealthResident is a 1322 x 803 x 379 mm tethered system designed principally for fish farm net-cleaning operations. It can be directly controlled like an ROV as a simple baseline, with real-time comms and a three-phase, 400 V, 7.5 kW power supply enabled via umbilical. Additionally, updates for full autonomy and AI-based net analytics form parts of Ocein’s development roadmap.
“StealthResident thrusts and hovers around fish farms like a standard eight-thruster ROV, with a conventional disc pump used for projecting high-pressure jets of water to clean the net,” says Erlend Dypbukt, autonomy engineer at Ocein.
“Operating from a remote onshore control centre brings several value-additions, like saving the crew from having to drive their boat over every inch of each fish farm to clean it, and reducing cross-contamination between farms.
“With increasing autonomy, each UUV pilot will be able to oversee and manage more farm maintenance tasks at once. Full autonomy is a work in progress, and one that we’re planning to work towards with one update at a time, each bringing new capabilities and features.”
One capability enabled, as of writing, is intelligent net inspection. Through a front-mounted camera, StealthResident automatically detects holes in farm nets, records their approximate positions and exports them to its operators.
The company’s subsequent updates will bring cruise control and autopilot functionalities, although traditional means for achieving autonomy may not be applicable in fish farm environments.
“On top of GNSS not working underwater, compasses aren’t perfect because StealthResident will be working in a magnetically noisy environment, so it’s tough to rely on either technology,” Dypbukt explains.
“Then there’s the camera we have, which you’d think would be a simple gateway to visual odometry and vision-based SLAM [simultaneous localisation and mapping] algorithms for underwater navigation.”
SLAM is viewed as the easiest and likeliest pathway to autonomy because it would allow Ocein to update and retrofit its existing hardware with a software-defined approach to autonomy. Hence, no sending of hardware upgrade kits or taking units back for modification would be necessary. However, fish farms remain difficult environments to navigate visually.
That stems from a combination of inconsistent visibility levels in the waters of fish farms, and the lack of suitable landmarks from which the UUV could gauge or triangulate its position. While we have seen cases of road vehicles that could count lane markers to track their changing position over time, the vast, moving and potentially strobing grid of the fish farm’s net walls is far more complex and cumbersome for machine vision to track.
“Other UUV makers have successfully combined long-established acoustic technologies like USBL [ultrashort baseline], FLS [forward-looking sonar] and INS-DVL [inertial navigation system–Doppler velocity log] solutions to enable decent navigation and autonomy underwater, but for us, that ‘traditional’ approach would mean problems like having to change StealthResident’s hardware architecture and design, which risks locking out its existing users from the autonomy upgrades,” Dypbukt says.
Wind farm inspection
For those seeking a more flexible, less permanent alternative to resident UUV installations for routine deep inspections of offshore infrastructure, combining USVs with UUVs is an appealing prospect. The former may be used as a carrier and mothership for launching and retrieving the latter, while also potentially providing the UUV and its owners with a persistent in-the-loop comms link (and power) through a tether, intermittent comms through an acoustic modem, or localisation and remote position monitoring via a USBL feed.

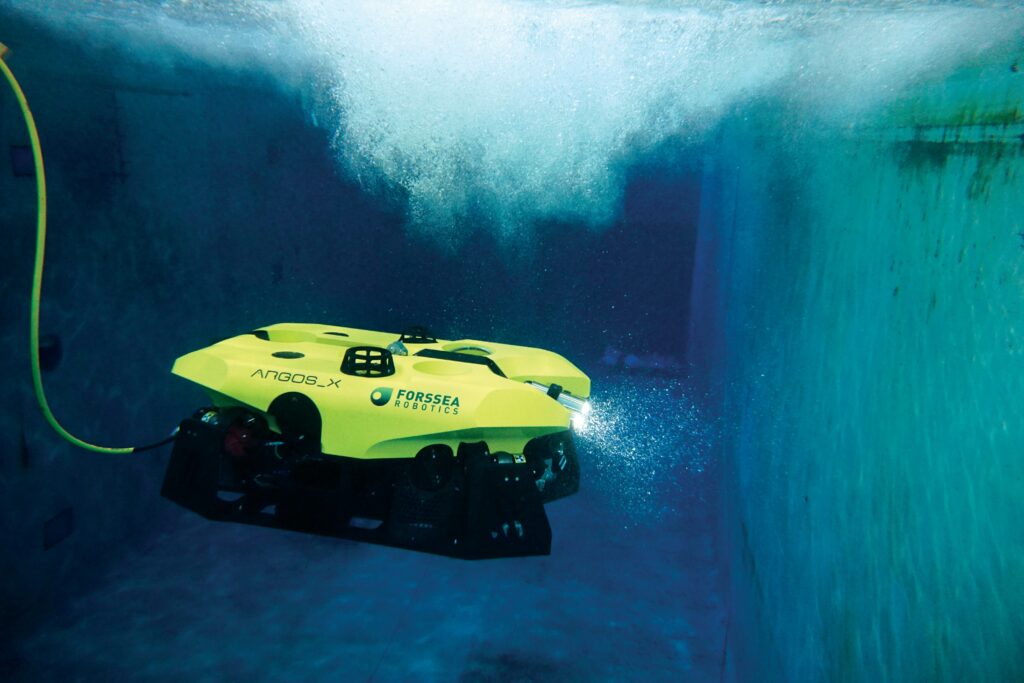
In one of the latest such major announcements for the offshore wind industry, a partnership has been formed between two French maritime autonomy suppliers, with the Smart ROV solutions of Forssea Robotics to be carried and deployed on Exail’s new DriX O-16 large USVs. While our readers are likely familiar with Exail, Forssea is a newer name in uncrewed systems – although one that has rapidly become established in Europe’s Blue Economy.
Like other companies discussed in this feature, Forssea was originally founded to fill a large market gap for UUVs with higher capabilities than the standard-issue ROV. As Gautier Dreyfus, co-founder and CEO of Forssea Robotics tells us: “While we adhere at the high level to best practices in ROV design, like building with six-to-eight thrusters distributed across a robust frame, at the deeper levels, we want state-of-the-art technology to make a more modern kind of vehicle.
“When you zoom inside our vehicles, you’ll see we use much more advanced electronics and computers than is normal and, as a result, I don’t feel industry-standard ROVs can carry the kind of intelligence, command or control capabilities that our Smart ROVs do. Our first priority, in fact, was to make sure our ROVs would be compatible with smart or intelligent autonomy.”
To support that, Forssea also develops a range of products it calls its Smart Cameras, which it designs as turnkey systems for underwater computer vision, image treatments, real-time streaming and actionable data for in-the-loop mission monitoring. Units in this range include its 1080p MINI CAM, which is built around a Sony IMX327 and depth-rated to 500 m owing to its hard anodised aluminium canister and sapphire lens, and its OBS CAM, which can provide 1080p, 720p or lower-resolution imagery over H.265, H.264 or MJPEG compression streaming, built around a Sony FCB-EV7520 HD.
UUVs provided by the company include its Argos ROV, which weighs 170 kg in air, carries up to 20 kg of payload, and comes with 7 kW of onboard power for sensors and other application-specific systems. These may include frame-mounted sensors for cathode protection, ultrasonic testing, flooded member detection, subsea visual systems, sonar and caviblaster surveys, or skid-mounted electrical manipulators, cleaning brushes, multibeam echosounders and pipe tracker solutions – in addition to the aforementioned Smart Camera range.
“The Smart Cameras enable various autonomous vision capabilities, and we combine those with autonomous flight or navigation capabilities to ease the workload on the ROV operators; some of our engineers will even work on both, so we don’t always make a clear distinction between the two,” Dreyfus says.
(Image: Forssea Robotics)
“On top of that, the end users in offshore wind and other industries we cater to, they really expect you to stream data to them with as close to zero latency as possible. Not many appreciate just how hard that is. You can have a really expensive Starlink antenna on the USV but, frankly, Starlink cannot guarantee persistent, high-quality streaming in real, harsh ocean conditions. The underlying computer, electronics, and internal and external datalinks must be designed or programmed to be really, really robust, and the only reason we can do that is our exhaustive hands-on experience. We’ve gone out to sea over and over to learn how to engineer-out for every real-world problem the ocean hands to uncrewed systems.
“The industries we supply to can be quite conservative on whether they’ll trust a relatively new company and its tech, so it’s important that we iterate as rigorously as we do. We develop, engineer and assemble everything in our Smart ROVs in-house, and then validate them in severe meteorological and oceanic conditions to make sure we have real-world data on how they perform in seriously punishing environments.”
Reconnaissance
The fast-paced, changing nature of global conflict continues to propel the need for highly modular and portable solutions that can be adapted as needed for the different kinds of threats that both symmetric and asymmetric warfare can bring.
With such varying needs in mind, Skana Robotics has designed its Stingray AUV as a modularly extendable and collapsible platform. While typically coming in at 180 kg weight in air and 235 cm in length, the approximate midsection of the torpedo-shaped UUV comprises a battery pack compartment, which can be lengthened by additional sections (while staying 53 cm in diameter regardless of final length).
“You can add ‘bricks’ of battery to have more range and endurance, or if you don’t need very long endurance and you want a less pricey system to suit a tighter defence budget, you can use fewer battery sections, given that the battery is among the most expensive parts of an AUV,” explains Alon Leshets, product manager at Skana Robotics.
The Stingray is rated to a maximum depth of 300 m, standard range of 45 nmi, with a payload capacity of up to 15 kg in air, and speed of up to 12 knots thanks to its thrusters and hydrodynamics.
The thruster arrangement has also been optimised to enable loitering and hovering in limited stints. Five hubless thrusters from Rim Drive integrate about the hull: two of these are embedded vertically inside the body for pitch, ascent and descent, two others run at the ends of wing-like arms to provide the main propulsion, and the last embeds inside near the front as a bow thruster for steering.
The short wing-like arms also integrate two electromechanically actuated control surfaces that function as ailerons, with a third control surface sitting in a fin atop the central span of the arms, which serves as a rudder for added steering power and precision during forward motion.

(Image: Skana Robotics)
“This combination of thrust and control gives Stingray a level of manoeuvrability equal to ROVs and encroaching on some UAVs; on top of that, it has a modicum of gliding capability thanks to how it’s designed, not through variable buoyancy but hydrodynamics. And we can also scale the thrusters up or down in size and power to suit customers’ individual needs for power, carrying capacity, speed and so forth,” Leshets says.
The system can also be programmed to lie motionless on the seafloor in a low-power mode, monitoring persistently at a strategically imperative underwater infrastructure or border territory for signs of faults or encroachments by hostile actors. Its developers have deliberately opted for low-priced subsystems wherever possible, not only to reduce the manufacturing cost and purchase price per Stingray, but also to minimise the sunk costs for any users wanting to deploy them as attritable assets.
Hence, the intelligent autonomy in Stingray comes not from highly advanced CPUs or powerful next-generation GPUs, but robustly written control and intelligence algorithms, as well as behaviours programmed in high-end simulation environments. Skana’s SeaSphere interface also functions as a centralised mission planning and resource allocation system, through which operators of multiple Stingrays (and Skana’s other uncrewed maritime vehicles) can preset the level of autonomy in each unit prior to the start of a mission, together with specific behaviours to be adopted when comms links vanish or other predefined events occur.
Joint task forces
The Robotic Experimentation and Prototyping using Maritime Uncrewed Systems event (REPMUS) is an annual exercise hosted by the Portuguese Navy, NATO and the University of Porto’s Faculty of Engineering (and co-organised by the European Defence Agency) for organisations to test and demonstrate the latest defence-critical advancements in uncrewed maritime systems.
Spain-based IQUA Robotics is among the most regular participants, having been invited to the event each year since 2022, when the Spanish Navy asked IQUA to trial not only its standard mapping products and software, but also some key differentiating algorithms beyond classical AUV applications.
As Marc Carreras, CEO at IQUA tells us, “For REPMUS22, they asked if we could do an automatic target detection [ATD] system, which we developed based on forward-looking sonar [FLS] technology.”
The ATD enabled IQUA’s SPARUS AUV to automatically detect targets of predefined parameters amid otherwise standard mapping operations, and subsequently change course to acquire or inspect the target more closely. The FLS would operate on its lower frequency (1.2 MHz) during the detection phase, and switch to its higher mode (2.1 MHz) as well as switching on its camera (if integrated) when looking to acquire more precise target imagery.
In the subsequent years, IQUA improved this algorithm (which was based on classical image detection rather than machine learning) and related technologies, expanding its capabilities through trials of critical infrastructure monitoring at REPMUS23, and collaborative trials using the Spanish Navy’s own SPARUS II AUV units in REPMUS24, gathering data vital to r&d all the while.
“So, in 2025, we were able to demonstrate an automatic target recognition solution that was far beyond the capabilities of the ATD from back in 2022,” says Natalia Hurtós, software product manager at IQUA.
“Over the years, we experimented with different target reacquisition patterns, ensuring that in each mission, the AUV revisited potential targets using a different approach. This allowed us to improve our software’s ability to detect and recognise targets from varying angles and altitudes, as well as to reduce the time spent on each inspection.”
Accordingly, IQUA greatly accelerated its mapping and target acquisition speeds, which it evidenced at REPMUS25 through both mine countermeasure (MCM) and critical infrastructure protection demonstrations.
For the MCM operations, multiple surveys were conducted in an area designated for mine warfare exercises, each survey combining detection and reacquisition tasks. Each task came with a predefined low-frequency FLS survey trajectory, along which an automatic detector would identify potential mines, halt propulsion along the survey route, and replan for a reacquisition manoeuvre for close-up imaging via optical camera, high-frequency FLS and multibeam profiler.
For critical infrastructure demos, IQUA’s AUVs employed an algorithm to successfully detect, track and visualise a length of subsea cable using optical camera data. “Relying on optical camera images can be a limitation in low-visibility underwater environments, but when optical sensors do work, they can give far better resolution, colour and confidence for identifying targets than even very good acoustic data,” Hurtós explains.
Carreras adds, “We’ve gathered vast underwater image databases over the past several years, through which we’ll now be able to train our recognition algorithms using more modern AI techniques, for faster and smarter target classifications, and future REPMUS exercises will represent especially great opportunities to trial them and get real-time feedback from those customers of ours with the highest standards, like the Spanish Navy.”
Showcasing autonomous proficiency for joint missions was also critical at REPMUS25, particularly through technical compliance with the new Volume III on NATO’s STANAG 4817, which details standards for interoperability and data exchange with maritime uncrewed systems.
Using this protocol, the Sparus II AUV was able to remotely receive target identification tasks from other teams participating in the exercise. Based on the list of received target locations, Sparus II autonomously calculated (and followed) the most efficient navigational paths for it to reacquire all targets.
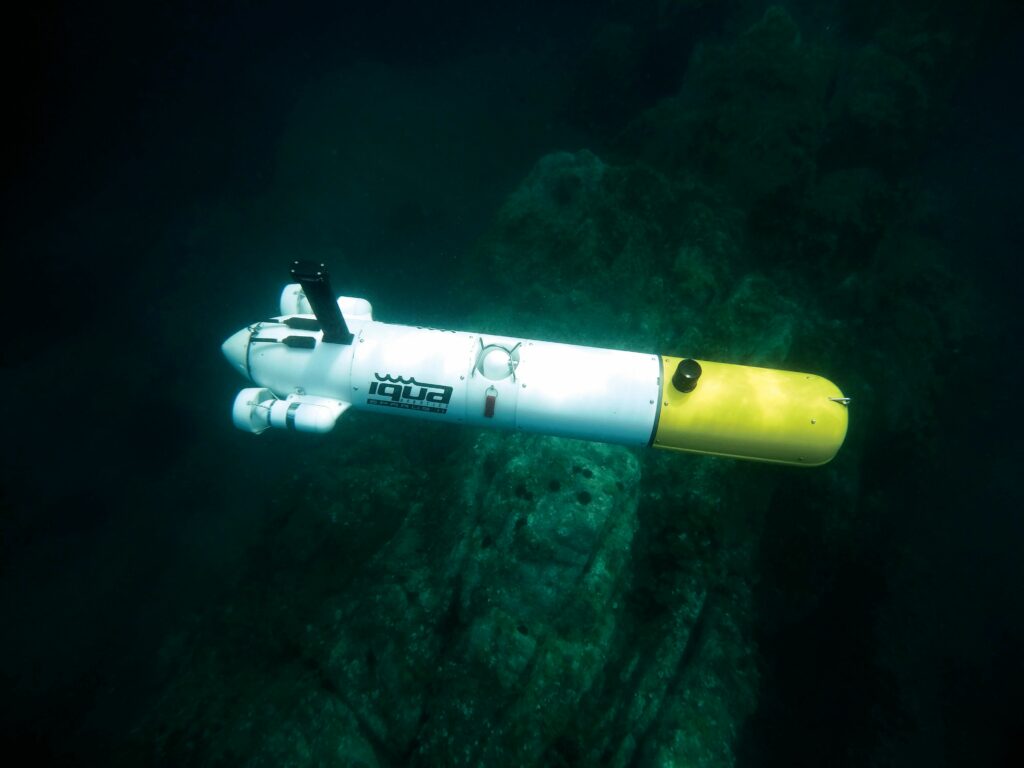
(Image: IQUA Robotics)
This included capturing data of sufficient quality to confirm the identity and nature of all targets, and rapidly delivering, for each target inspection, an optical map, a high-frequency FLS map and 3D point cloud from the multibeam echosounder (another new technical introduction for IQUA’s REPMUS demonstrations).
Summary
As discussed, uncrewed systems for industrial applications often take the place of crewed systems for being less pricey and much easier to deploy. Drones that often replace helicopters, self-driving trucks and shuttles are set for similar uptake, and AUVs increasingly replace ROVs and divers.
As uncrewed systems take on wider roles in defence, replacing crewed vehicles in logistics, medevac, ISR and strike roles, it is worth considering what evolutions in UUV design may come to serve that particularly unregulated space.
Some early pioneers in new UUV applications can be seen across industry. For instance, designs for autonomous, optionally-crewed submersibles for delivering divers or special forces teams are appearing in a few companies’ projects. Elsewhere, organisations like SeaTrain (Issue 64) are slated to explore the operational and engineering advantages of entrusting mass logistics to large UUVs.
One notable omission, however, is classes of UUVs for replacing naval submarines. Despite widespread agreement (particularly by US navy experts) that the future of maritime warfare is distributed operations with dispersed fleets of crewed and uncrewed systems, networked to coordinate sensors and weaponry for maximum effectiveness, autonomous strike capabilities are a rarity among navies.
But with UUV development becoming increasingly cost-effective, and weaponised UUVs – such as those deployed in the war in Ukraine – being touted by naval companies from Canada to China, autonomous versions of traditionally crewed, diesel-electric and even nuclear submarines may soon become a topic of discussion among military chiefs, and a critical requirement amid the ever-changing face of warfare.
UPCOMING EVENTS



