







Everdrone E3 UAV

(All images: Everdrone)
Doctor drone
Saving cardiac arrest victims by autonomous drone has never gone smoother or faster, thanks to the aptitude and innovations of this Swedish company. Rory Jackson investigates
Thanks primarily to a widespread prevalence of unhealthy lifestyle habits, cardiac arrests are on the rise across much of the world, especially among younger demographics. Mounting obesity, cardiovascular disease, type 2 diabetes, vaping (among other forms of tobacco abuse), alcoholism and lack of access to mental healthcare mean that in some places, one in five cardiac arrest victims is under 40, and the rate of such incidents for those in their 20s or early 30s increased by around 2% every year following 2000.
In any emergency, speedy response times are paramount, and cardiac arrest victims are especially vulnerable if left untreated for even a little too long. The need for an agile solution to this growing problem is clear – but thankfully, increased medical awareness of the crisis has coincided with the rise of smart medical technologies, and of uncrewed systems.
Everdrone, based in the city of Gothenburg in southwest Sweden, has been making headlines in 2025 for successfully combining these forces into a comprehensive and (most importantly) lifesaving CONOPS by which UAVs are enabling counter-shock (or ‘defibrillation’) treatments for victims quicker than ever before.
Originally spun-out from the company behind the Sleep Cycle app in 2017, Everdrone was formed out of a collective interest in how new technologies in autonomy, sensors, vision and more were converging to make drones highly reliable and workable for real-world use-cases.
As Mats Sällström, Everdrone CEO tells us, “I and Maciej Drejak [senior software engineer], the founder and then-CEO of Sleep Cycle, wanted a new venture, and had a genuine interest in how drone tech could help society, and so the same investors behind Sleep Cycle were happy to put a little funding into our UAV experiment.”
As ‘experiment’ implies, their approach was very open, taking on multiple research projects, including investigations of airborne blood deliveries (à la Zipline, featured in Issue 21) and fire rescue, until talking with the Karolinska Institutet in Stockholm – among the world’s foremost medical universities – in 2019.
“We’d grown increasingly interested in the potential of logistical applications, and Karolinska had already done theoretical studies researching the use-case of drones delivering defibrillators,” Sällström recounts.
“Logistics applications normally bring questions of your flight range, payload, airspeed and so forth to light, which sometimes makes it tough for electric UAVs to do a good job. But delivering defibrillators was a great fit because we knew exactly what we wanted to deliver – small defibrillators – and we knew we wanted to be on-site in just a few minutes to save a life, so small electric drones were basically a perfect technical match.”

Sällström and his team quickly leapt into development, putting several years of hard effort into crunching their mission times to get below the target five critical minutes between the reporting of a cardiac arrest and the arrival of an automated external defibrillator (AED) to counter-shock the victim. Although the company is now poised to start diversifying into and addressing other vital medical applications, it sat down with us to share how its flagship AED delivery operations play out, from planning through to lives saved.
The Everdrone E3
Although media coverage to date has mostly shown Everdrone’s prototype UAV, the company has now moved away from that platform to an original aircraft it designs and produces.
As Michael Öhman, Everdrone CTO, tells us: “Our first- and second-generation prototypes were made in-house after a few years of r&d, but closely based on an off-the-shelf design, and we’d reached the limits of its capabilities. Making an OEM drone from a blank sheet would not only unlock the performance and safety enhancements we wanted, but also allow us to keep the design open and controlled for further changes, thereby future-proofing it too.”

Thereafter, the company looked into many off-the-shelf drones as prospects, including DJI’s, but by and large, they would not achieve the necessary target of being able to fly very quickly, precisely or safely to incident sites beyond visual line of sight (BVLOS) in urban areas.
Thus, despite having initially been determined to focus on software, and leave all hardware work to drone OEMs and Tier 1 subsystem suppliers, Everdrone now commissions carbon composite structures, and assembles them into its E3 UAVs – the design having been completed in late 2025 after roughly one and a half years of r&d.
The company’s engineers also integrate the powertrain, flight controller, sensing, comms and other components as needed for rapid medical deliveries, and for safety levels compliant with achieving Special Operations Risk Assessment (SORA) clearances to fly BVLOS in urban missions.
The E3 UAV is an octocopter with four coaxial motor-prop pairs arranged in an H-8 configuration. The system measures approximately 900 mm in length and 750 mm wide (when measured from motor to motor), is 550 mm tall, and fits props of 22 in (558.8 mm) diameter for operating speeds of up to 100 kph.

It is a fully electric system running on battery modules designed in-house by Everdrone, with their capacity enabling up to 60 minutes flight time, and their power enabling flights with a 24 kg MTOW, ensuring its operations are compliant with regulations under the ‘specific’ category for UAVs, as defined by EASA. Power and flight time additionally allow for a payload of up to 4.5 kg to be carried (for reference, the typical AED weighs between 1 and 3 kg).
“Developing a UAV from scratch is obviously a huge challenge, but it also puts you into the driving seat; you can actually change things, improve things, and work things in, in a way that you simply can’t when you’re just commissioning or integrating with a third-party drone,” Sällström notes.
“We currently fly 80 kph; that’s fast for a multi-rotor, and we want to push it to 100 kph while maintaining safety levels. Meanwhile, we’re also pushing for the final parts of use-cases and features that customers really want, across both hardware and software,” Sällström adds.
“For instance, our ‘MedKit’ is what we call the payload that our drones deliver, and while some customers just want an AED in it, they can actually add a tourniquet, some Naloxone for remedying opioid overdoses, and other items too. It’s up to them – we design and develop the box for features like connectivity and specific storage conditions, along with several key software products.”
GridPlanner
Of Everdrone’s software products, GridPlanner – which is typically the first that a new medical customer encounters – is an essential planning and intelligence tool in both the early feasibility studies preceding collaborations, and the routine preparations before a defibrillator gets flown out.
“Whether it’s one of the Swedish regional healthcare providers we work with, or KSS Air Ambulance in the UK, everything starts with data, and GridPlanner is how we analyse customers’ data to discern what value and benefits we can provide in a given region,” Sällström says.
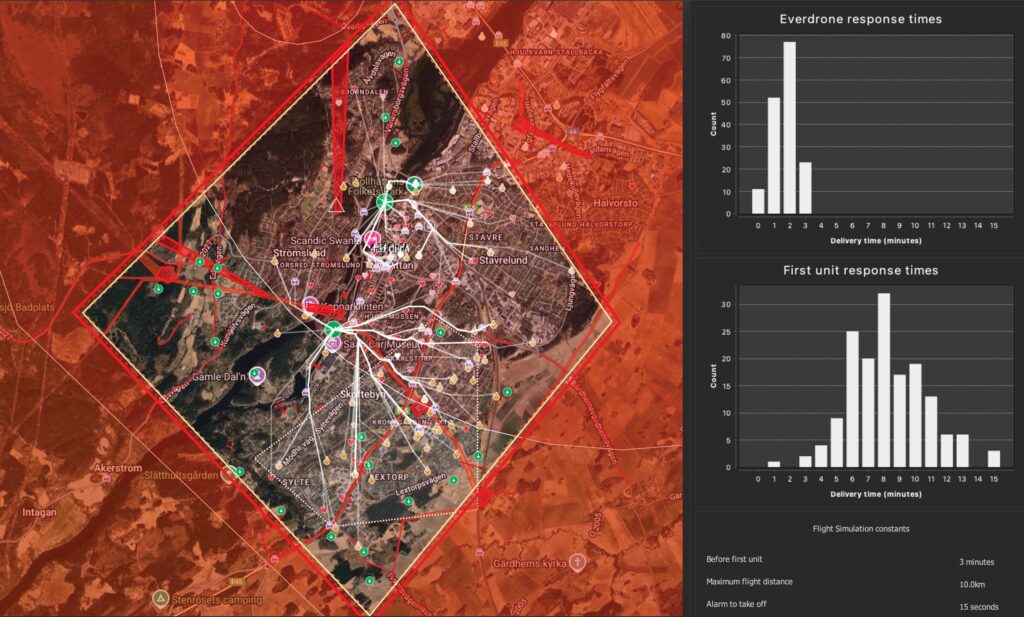
GridPlanner works by importing real-world data on cardiac arrest incidents and locations, and thereafter displaying exact positions of every incident across a map interface, each stamped with the recorded historical response time for the ambulance to arrive.
“Naturally, you get denser clusters of cardiac arrest in cities, where more people live, and the lengthier ambulance arrival times are the foundation of where Everdrone can provide life-saving value,” Sällström says.
Virtual drone sectors are then placed into the map to compare historical ambulance response times to estimated drone response times. The pair illustrates this to us by randomly selecting a past heart attack location in Central Sweden, and generating a flight path indicating that an E3 could get there in two minutes and nine seconds (compared with the nine minutes and sixteen seconds that the real-world ambulance took).
“Research shows that every minute lost equates to a 10% decrease in a cardiac arrest victim’s chance of survival. So, cutting seven minutes like that is an absolute game-changer,” Sällström notes.
“Ideally, we want the defibrillator on the patient’s body within five minutes of them collapsing. Taking account of the time needed for the emergency call, and for someone to pick up the defibrillator and apply it to the patient, that typically leaves two and a half minutes for the drone to receive the alarm, navigate to the incident scene, and deliver the AED. With such extreme time windows, shaving off every second really does matter.”

Flight paths auto-generated by GridPlanner, both for feasibility studies and actual flights, are not straight-line routes, however. To comply with regulations and ensure the safety of both drone and humans, the flight paths avoid ground obstacles, no-fly zones and areas where flying poses a risk to the people below.
“To that end, we’ve incorporated terrain data, urban data on tall structures and everything else GridPlanner might need to be extremely fast, precise and safe in how it predicts the optimal flight route,” Sällström says.
Öhman adds: “It helps that we don’t deploy our drones from the hospitals themselves. As the planning software hints in its name, we place them in a ‘grid’ of strategically apt locations from which they can cover as much ground as possible with their flight times, airspeeds and the surrounding environment.
“So, GridPlanner also triangulates where the drones should be located and standing on alert to be close to accidents before they happen, with the only restriction maybe being the budget of each partnership holding back the number of drones and bases we can put down.”
Rescue 911
The challenge of solving autonomous aerial AED deliveries resembles the challenge of general logistics UAVs, as told to us by Switzerland’s RigiTech previously (Issue 61), in that it is an operation requiring multiple different participants, perspectives and contributions.
Without some very different stages and angles being addressed correctly, some of the differing dispatch, preparation, launch, flight, delivery and post-delivery requirements will inevitably fall short, thereby creating gaps, bottlenecks or accidents somewhere along the chain.
“The first stage happens from the dispatcher’s point of view, when someone calls their national emergency number, like 112 here in Sweden or 999 for our UK partners,” Öhman explains.
“Once they understand the incident and location, they input it to their system, and the alarm is automatically sent to the ambulance and rescue services.”
But if the healthcare provider is an Everdrone customer, then it also goes to the UAV service company at exactly the same time, without the dispatcher at the call centre needing to push a button to do so. This way, no additional work, training or burden is placed on them; they simply follow their normal medical indexes (a healthcare-standard form of decision tree), altered non-intrusively to integrate Everdrone into one niche of them.
Upon receipt, Everdrone’s automated system checks the location, and determines the optimal flight route and envelope. The ideal UAV for delivering the AED is also subjected to a series of remote, automated subsystem checks for safe functioning, including every logical and physical sensor.
Several environmental checks, including via weather stations on Everdrone’s UAV hangar, and downloaded forecasts through the company’s partners at Swedish weather services, are performed, and Everdrone can decline missions if weather forecasts indicate sufficient safety risks. The company aims to be operational in 98% of weather conditions experienced in Gothenburg.
“In total, something around a hundred automated pre-flight checks are run, and if we need to fly in controlled airspace, our system automatically connects to air traffic control [ATC] for clearance,” Öhman explains.

“The drone is actually taking off while waiting for clearance, spinning up its motors and reaching a low hover, and if it doesn’t have clearance, it will wait there before ascending to waypoint altitude.”
Although battery energy is limited, receiving ATC clearance typically takes no more than 20 seconds, so no time is lost (and overall, significant time is saved) compared with preparations required for road ambulance AED deliveries.
Skybase
Each E3 drone is stowed in, and launched from, an Everdrone Skybase, and these are arranged in a strategic grid of city spaces, as indicated previously. While philosophically similar to drone-in-a-box solutions, in reality, the Skybase is shaped more like a shed and functions more like a traditional aircraft hangar, with a large horizontal door or hatch through which the UAV flies to start its mission.
Much like the E3, the Skybase was developed by Everdrone out of necessity because no existing drone box or hangar solutions suited its specific needs. “Through how we’ve designed it, the drone gets airborne in about 15 seconds, which we feel is uniquely fast for a drone of this size,” Sällström observes.

“We’re considering some alternate designs with a vertically disposed hatch because launching straight upwards might save a few additional seconds. But right now, the current design allows personnel to walk directly into our Skybase, which is important in the post-flight procedures, as we’ll explain later.”
Each UAV is kept at full state of charge in its dual-redundant battery packs via a charging cable. This constant power source also means that the main flight computer, companion computer and data links are also fully powered for signal reception and automated checks, with no chance of lengthy initialisation procedures hampering a quick launch or emergency response. Instead, the ‘brains’ of the drone stand ready to activate the navigation systems, motor drives and so on at a moment’s notice.
The charging cable runs up from the Skybase’s power source up to the drone’s power input, gently secured via a magnetic connector. After connecting with ATC for flight clearance and ascending, the force of the multi-rotor’s ascent and forward flight out of the Skybase allows it to pull free of the cable – the magnetic connector coming off and falling gently onto the ground.
“We’re also working on a different automatic charging solution; we’ve not released the design yet, but it’ll enable the drone to re-initiate its own charging after returning from a mission,” Öhman adds.
Do no harm
A number of measures have been taken by Everdrone to ensure as safe a flight as possible is performed from Skybase to cardiac arrest location, with no threat to civilians below. For instance, the UAV as indicated carries numerous redundancies, such as the dual battery packs enabling an uninterrupted energy supply and reserve energy for emergency landings in the event of one being cut off or damaged.
Additionally, the drivetrain of multiple coaxial, redundant rotors is such that the E3 continues flying if a single motor or propeller is lost. Tests by Everdrone showed that the system need not even change any of its calculations, commands or subroutines to account for changes in thrust or balance following such an incident; it continues assuming it has all available motors and props at its disposal, while Everdrone’s monitoring staff can remotely take note of the situation and make an informed decision regarding how to end the mission in a safe manner.
However, the overall UAV system still maintains a closed loop around monitoring for potential issues. As the E3 drone flies, many of the automated checks that happened during pre-launch assessments will continue running, with automatic and manual fail-safes available to kick-in with a range of countermeasures and failovers should a fault be detected or suspected.

Troubleshooting can even take place on an ad hoc basis down to the level of bare code. “As well as providing GridPlanner, Remote Pilot UI and the MedKit as in-house products, the entire development suite we use is an in-house software product,” Sällström says.
“That was something we decided early on. We wanted our UAV design and programming work to be done through a tailored interface, so that we could treat the hardware as simply as if it were just another of the kinds of software apps that we’re so used to working with.

“When you’re producing mobile and computer apps, you have very fast turnaround times – you can be combing deep through code, then suddenly you’re building, then you’re deploying, now you’re testing and then you’re back in the code again, fixing something. Working with conventional hardware systems can mean taking minutes or even hours in the worst cases to fix something.”
So streamlined and user-friendly are Everdrone’s development tools for quick iterations, new code can be deployed to the drone as it flies, potentially with multiple patches or hotfixes per flight.
Hardware, as mentioned, is another matter entirely; dealing with the UAV’s vibration has posed a significant challenge to Everdrone. “That’s probably why you don’t see so many drones of this size and shape operating at the speeds we do – it’s one thing to hit 80 kph during a specific part of the flight, it’s another to constantly maintain 80 kph and above. In such operations, you have to deal with the consequence of inducing very high vibrations from the props, motors and your drag through the air,” Sällström says.
Öhman adds, “So we’ve worked quite a bit to minimise vibrations, with appropriate dampers and choices of electronics to prevent damage. We also have subsystems onboard like dedicated IMUs, which measure vibrations in the X-, Y- and Z-axes, and then a software algorithm we’ve developed will identify and analyse in real time if vibrations for any reason reach dangerous levels, or if they behave unnaturally or inconsistently with normal operations.
“If we get an alert for that, we can opt to land or troubleshoot it. But there’s also a certain numerical safety threshold for vibration; if that gets exceeded, the UAV automatically engages an emergency landing without waiting for our input.”
There are also limits to what different parties involved with the AED deliveries can see and access. Everdrone integrates its backend with existing emergency dispatch centres, connecting fleet management, route planning, remote black boxes and other critical modules to take account of incoming cardiac arrest alerts.
“We also provide the Remote Pilot UI and our Mission Manager for different personnel to monitor the E3s as needed. This is an interesting thing to note because the imagery we’re delivering from incident sites, from the drones’ cameras, is very, very sensitive imagery,” Sällström says.
“While we’re ostensibly focused on cardiac arrests, there’s always potential for the imagery to show all sorts of gruesome incidents such as suicides, or injured or dead people – so Remote Pilot is not allowed to see those images. An operator monitors each mission at Everdrone, checking that the flight is safe and compliant, but then the HD zoom camera on the drone is fully controlled and managed through the Mission Manager portal at the dispatch centre.”

Although Everdrone avoids making drone training a requirement of its service, not wanting to interfere with the role of the dispatcher, the manager at the dispatch centre can, if they so choose, command the drone to move in different directions, and to observe an incident site from different angles and distances. The Everdrone operator maintains a higher-still control priority for enshrining flight safety and ATC compliance that is managed from a map-based, top-down view and a rudimental low-resolution FPV image.
Path finders
As discussed, the flight paths autonomously taken by the E3s are not pre-approved or geofenced corridors, but freshly calculated routes taking into account terrain, weather, ground conditions and regulations according to SORAs.
Those regulations state that UAV operators must reduce the ground risk of their drones’ flights (in terms of the likelihood of harm to people on the ground in the event of a drone crash and the potential for damage, influenced by factors like the drone’s dimensions, its operating area and its kinetic energy if crashing) by 90%, between the initial risk assessment versus the final assessment.
That 90% reduction must be achieved through three key methods: having an emergency response plan to address incidents, installing systems to reduce crash impacts (like parachutes) and adopting strategic mitigations such as evaluating the density of people below when flying, to avoid flying over crowds.

“We’re successfully complying with that latter one by claiming that 90% of people spend their time indoors, and that just 10% of people are outdoors. But that can be debated, so as an extra layer of strategic mitigation, we use an intelligent route-planning logic that considers more-populated or typically crowded areas,” Sällström says.
“On the flight out to the incident site, we of course want to get there as fast as possible, so we fly as straight a route as possible. But when the E3 returns home, it’s not in such a hurry. So, it’ll intentionally take detours around populated areas, so that 80% of the time it should be flying over few to no people at all. It’s not only safer, but also less intrusive: it means less noise pollution and visual disturbance or distraction to people and animals too.”
Interference, spoofing and jamming of GNSS signals have yet to affect any of Everdrone’s missions, but it is a concern the company takes seriously nonetheless. Both IMU data and camera data are utilised as unjammable points of reference in the E3’s flight intelligence and safety checks to periodically ensure that hostile actors are not leading the drones astray, whether out for delivery or returning.
Service intervals
Such is the need for ensuring that every drone is ready to redeploy after returning, that immediately after the emergency call, someone heads to the Skybase concerned to be ready to reset and prepare the E3 unit via a technical inspection (TI). That someone is either an Everdrone technician, a hospital staff member, local third-party technician or others with sufficient technical skill (Everdrone only provides training for the lowest tier of TI), depending on the use-case.
“Once the drone’s back, they can plug the magnetic charging connector back in and perform several manual checks as quickly as possible to complement the automated ones; pulling propellers, checking motors and so on to ensure everything’s still fine,” Öhman says.

These, too, are processes Everdrone plans to automate to better speed and sanitise post-flight maintenance. Remote TIs are likely to be realised through camera-based analytics in the near future, charging improvements are being worked on as mentioned, and potential ways of reattaching the AED without human intervention are planned for r&d coming later down the line.
“On top of that regular, low-level TI after every flight, we do an extended TI on each UAV at every twentieth hour it’s flown, and then we have a servicing threshold of about 100 flight hours – so that’s three levels of servicing activities across which we authorise different persons,” Sällström adds.
Future
In addition to particular focus on expanding through the Nordic markets of Sweden, Norway and Denmark, along with continued growth in Britain, Everdrone has recently added France to its target areas of activity.
Announcements in late 2025 have publicised its partnership and first small-scale operations with Service d’Aide Médicale Urgente (SAMU), the French national emergency dispatch organisation, as well as local UAV services company Delivrone.
“It’s quite exciting that everything still gets operated and overseen from our base in Gothenburg,” Sällström says.
“But from the technical side, we’re really transitioning the company to focus less on drone r&d and more on customer-centric solutions. Tailoring our MedKits, for example, is one definite pathway we’ll pursue, like having different sensors, comms links and compartments that activate conditionally based on what’s happening at the receiving location.”
A wide variety of software solutions are also to be explored, such as expanded customer-side portals for tracking performances of their region’s drones, analytics of how new tech introduced into the CONOPS might affect efficiencies, or AI overlays to aid decision-making for medical or emergency personnel viewing the drone’s live camera feed.
Everdrone will soon also integrate its backend with various forms of connected devices, such as medical wearables, fire alarms, gunshot detectors or EVs. It views this as a natural next step for dispatching its drones faster because instead of waiting for somebody to note an incident, make an emergency call and verbally provide the necessary information, alarms and locations will be triggered directly by worn devices, crashed road vehicles and the like.

With an established and high-functioning operating model under its belt, and considerable new innovation on its way to join its hefty present IP, the founders of Everdrone can doubtless rest assured that their aim to help the world via drone technology is secured.
Key specifications
E3 UAV
H-8 octocopter
Fully electric
Dimensions (motor-to-motor length and width): 900 x 750 x 550 mm
Weight: 24 kg
Payload capacity: 4.5 kg
Peak airspeed: 100+ kph (remains under validation)
Maximum continuous airspeed: 80 kph validated, 90–100+ kph actual (pending validation)
Maximum endurance: 60 minutes approx.
(Maximum altitude TBC)
Some key suppliers
Composites (main core and other details): Aston Harald Composite
Electric motors: LIGPOWER
Motor controllers: LIGPOWER
Propellers: LIGPOWER
Autopilots: Pixhawk/Ardupilot
UPCOMING EVENTS



