







Triple-loop servo control
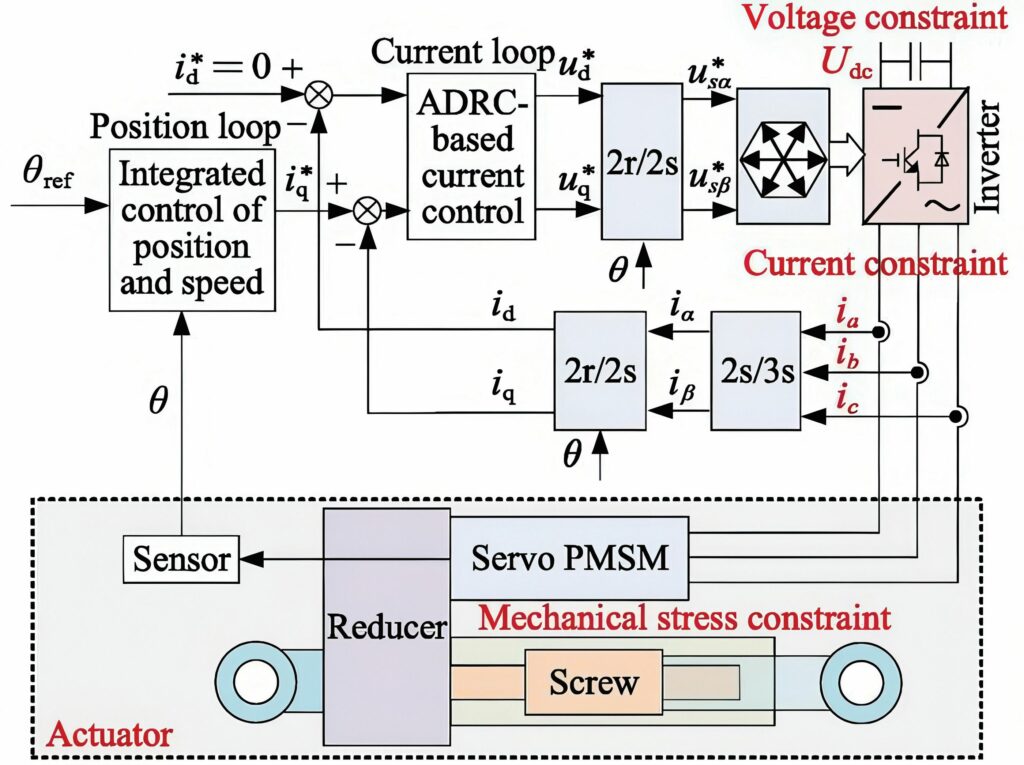
(Image courtesy of Xidian University)
Researchers in China have developed a new algorithm for more agile servo control, writes Nick Flaherty.
Active Disturbance Rejection Control (ADRC) is based on a triple-loop approach with a technique called disturbance suppression and does not rely on an accurate model, exhibiting robustness to uncertainties.
Unlike traditional methods that might struggle with complex, unpredictable real-world disturbances, ADRC takes a fundamentally different approach; estimating the total disturbances in real time, whether from electrical parameters or from changing loads.
Once estimated, ADRC generates a precise counter-signal to actively cancel out these disturbances before they can degrade performance. This proactive disturbance rejection directly translates to the ‘holy grail’ of servo control – significantly enhanced control bandwidth (faster response), superior steady-state positioning accuracy (pinpoint control) and improved overall efficiency.
First, multiple disturbances in the electromechanical servo systems are analysed. Then, the disturbance-rejection methods for the current loop and the position loop are summarised. Finally, the development trends of aviation electromechanical servo control are addressed.
There are still challenges for the ADRC system’s bandwidth and optimising the servo control under multiple constraints, as well as integrating ADRC into existing complex uncrewed aircraft control architectures. “Testing on flight hardware under realistic operational stresses is the crucial next step,” said Chunqiang Liu, a researcher at Xidian University.
UPCOMING EVENTS


