







Cooperative exploration of caves
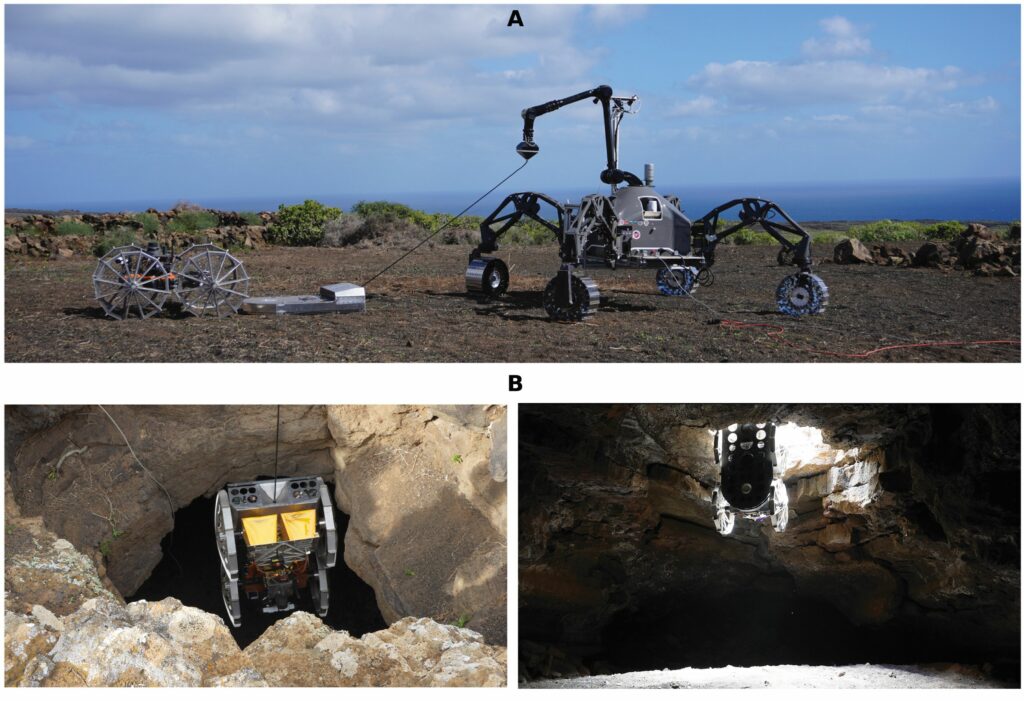
(Image courtesy of the University of Malaga)
Researchers in Spain have developed a technique that allows groups of autonomous robots to explore cave systems on other planets, writes Nick Flaherty.
The team at the University of Malaga defined a lava cave exploration mission concept, including four mission phases that are performed by a heterogeneous team of three robots. The concept was tested in a lava cave on the island of Lanzarote, where the robots were able to build a three-dimensional model of the surrounding area and skylight, introducing a scout rover on a rope to explore the inner part of the cave.
Exploring cave systems such as lava tubes on other planets is dangerous and the opportunities for remote operation are limited by interference. This makes them a suitable candidate for remote exploration with swarm algorithms.
The SherpaTT is a hybrid rover with wheels and legs and weighs 210 kg when fully equipped with a 25 kg payload. The rover is extended with an external avionics box that provides autonomous navigation and mapping capabilities via a field-programmable gate array (FPGA)-based board for data acquisition and a NUC computer for the mission management stack.
It also has a robotic manipulator with six degrees of freedom for carrying and deploying the required payloads, as well as for acting as a mobile anchor during the rappel operation.
The second rover is the 20 kg Coyote III that is suitable for rappelling and exploring narrow lava tubes. It has skid-steering locomotion with four wheels and a passive joint for the back-wheel axis, which improves the system’s stability over rough terrain. It is equipped with a ground-penetrating radar to explore the subsurface to find lava tubes as well as stereo cameras for navigation.
To perform rappelling, a tether management and docking system (TMDS) was designed to include the tether that connects the SherpaTT to the Coyote III. The tether is rolled on an actuated spool inside the TMDS to control the winding (and unwinding) velocity.
To minimise wear on the tether cable through friction against surfaces while rappelling, the designed solution unrolls the tether from Coyote III. The integrated tether could be spooled and unspooled with an active winch, and a force sensor monitors the tether tension to avoid entanglement or slip.
The tether also transmits power and data from the SherpaTT to the TMDS to control its actuators. This link can be used to provide energy to the Coyote III inside the lava tube and to communicate between the rovers.
The last part of the system is the LUVMI-X, an existing lunar rover that weighs 30 kg. This can perform autonomous navigation and mapping in collaboration with the SherpaTT to explore the area surrounding the skylight. The LUVMI-X design enables the rover to carry a set of configurable payloads based on the scientific nature of the mission. For this mission, LUVMI-X was equipped with a 1.2 kg sensor payload cube and a launcher to eject the payload into the skylight.
UPCOMING EVENTS


